


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Lane line detection method
A lane line detection and lane line technology, applied in the field of lane line detection, can solve the problems of slow detection speed and cumbersome process, and achieve the effect of improving the detection speed and simplifying the process.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 2
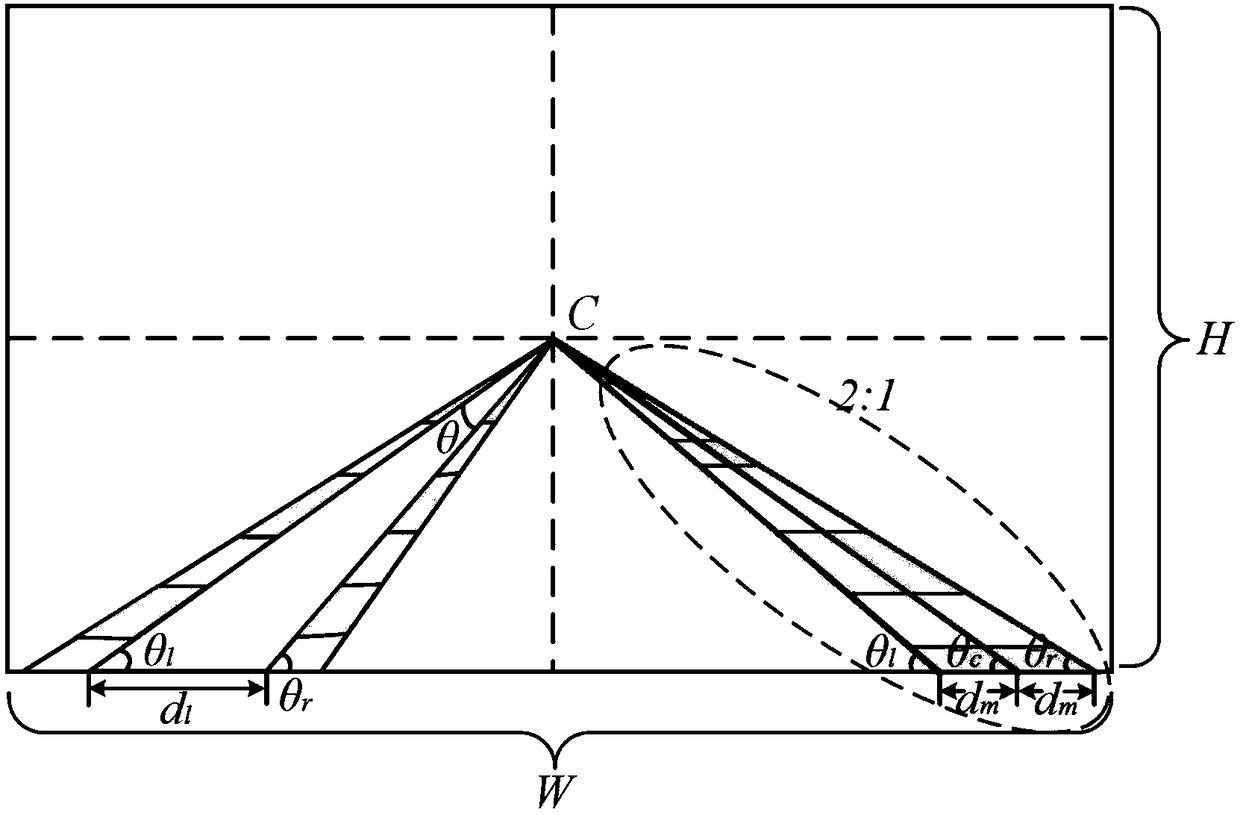
[0053] figure 2 A schematic diagram of the calculation principle of left and right lane lines and lane widths with equal width constraints provided by Embodiment 2 of the present invention is shown. The process is detailed as follows:
[0054] The proximity range is calculated as follows: figure 2 As shown in the lower right corner, assuming that the horizontal intercept of the lane line on the edge of the image is dm, the angle of the candidate point is θc, and the height and width of the image are H and W, the angle of the possible left and right edge lines of the lane line is (θl, θr), the specific calculation formula is:
[0055]
[0056] The calculation method of the edge point with the highest probability is as follows: the angle of the candidate point is θc, the accumulated value is A, the angle of the paired point is θ’, the accumulated value is A’, and the corresponding probability p is
[0057]
[0058] When p is greater than the preset threshold, the pair...
Embodiment 3
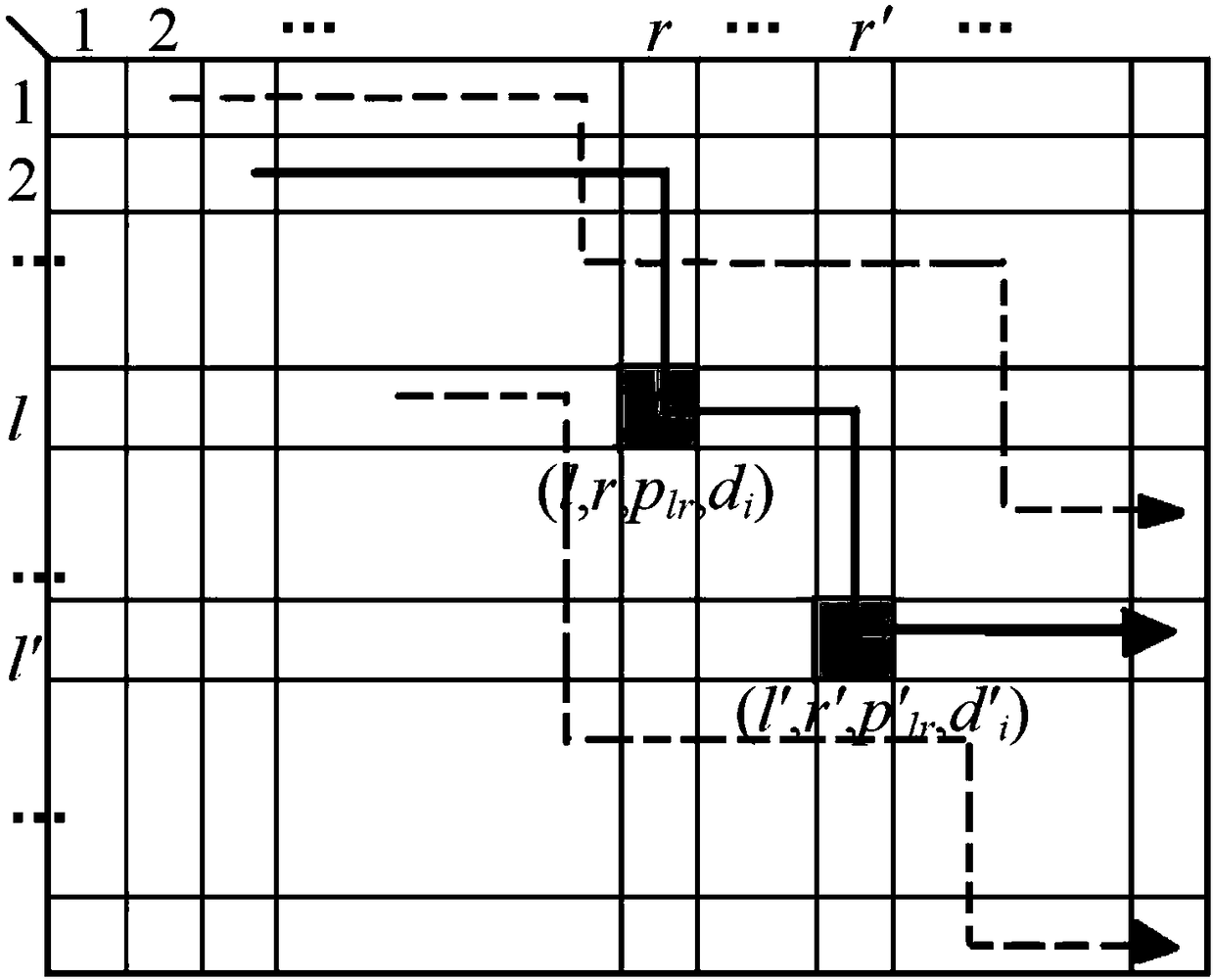
[0061] image 3 shows that in the probability matrix dynamic programming, searching for the optimal lane combination, Figure 4 A specific flow chart of searching for an optimal lane line by using dynamic programming provided by Embodiment 3 of the present invention is shown. The process is detailed as follows:
[0062] Using dynamic programming to search for the optimal lane line, the specific steps are as follows:
[0063] Step 301, find the largest k values in the probability matrix to form k combinations, the position, probability and width are (l1, r1, p1, d1), (l2, r2, p2, d2)...(lk, rk ,pk,dk);
[0064] Step 302, perform the following calculations for each type of combination from the lane line combination in the previous step: For example, the i-th combination, whose position is (li, ri), find m values rij with similar width and maximum probability in row ri, Put it into the tail of the combination to become (li, ri, rij) (1≤j≤m), and calculate the average prob...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com