Sanitation truck working path planning method based on road surface cleanliness detection
A technology for path planning and sanitation vehicles, applied in road cleaning, cleaning methods, vehicle position/route/height control, etc., can solve problems such as increased fuel consumption or electric energy, reduced operating efficiency, and reduced cleaning efficiency to avoid increased energy consumption. , saving water and improving the efficiency of cleaning operations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
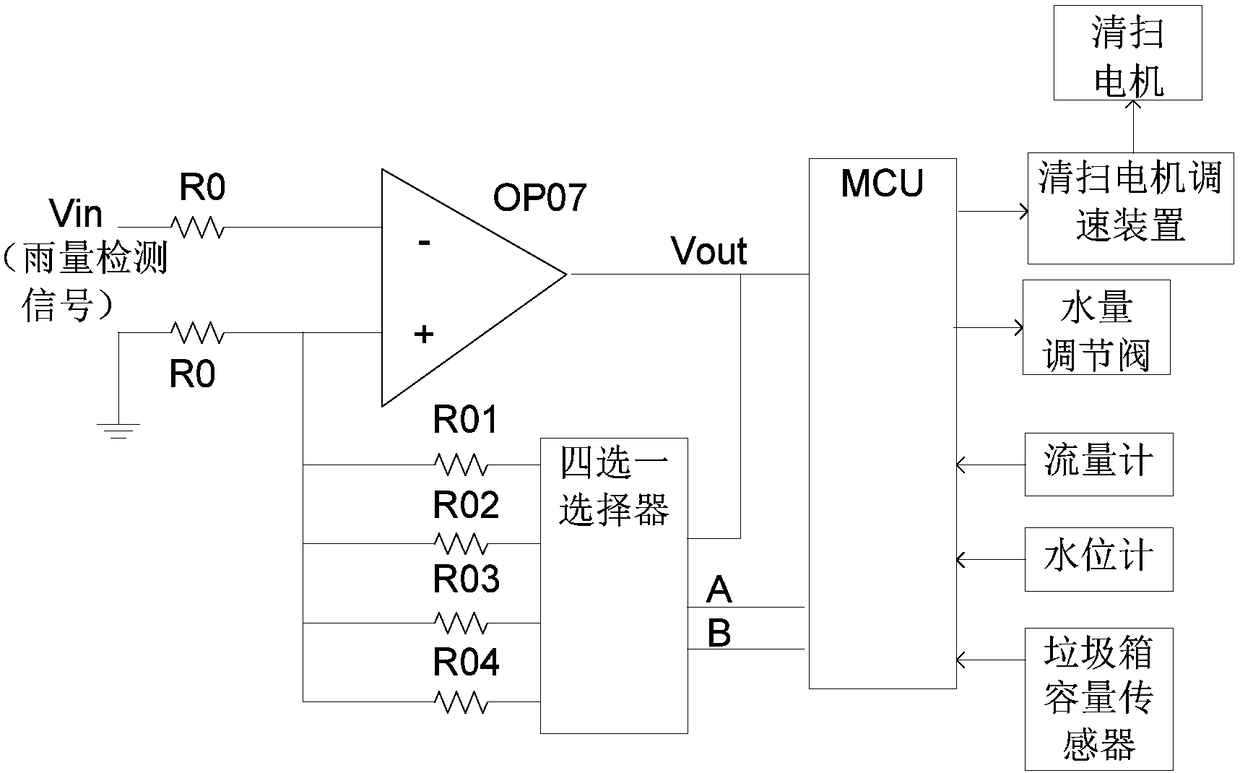
[0077] Embodiment 1: as figure 1 and 2 , a sanitation vehicle operation control method based on rainfall detection, the operation vehicle detects the real-time rainfall value during operation through the rain detection circuit based on the rainfall sensor; adjusts the opening of the water regulating valve according to the rainfall value to adjust the water spray in the cleaning mechanism amount to save water storage in the water tank.
[0078] The opening (percentage) of the water volume regulating valve K=1-k1*Rx; k1 is a constant, and the value of K is between 0-1; Rx is the output voltage value of the rain sensor. The value of k1 depends on the actual situation.
[0079] Including water replenishment control methods based on rainfall detection;
[0080] The replenishment control method comprises the steps:
[0081] Step 11: Detect parameters related to hydration:
[0082] Detect or calculate the following parameters:
[0083] (1) Detect the current remaining water sto...
Embodiment 2
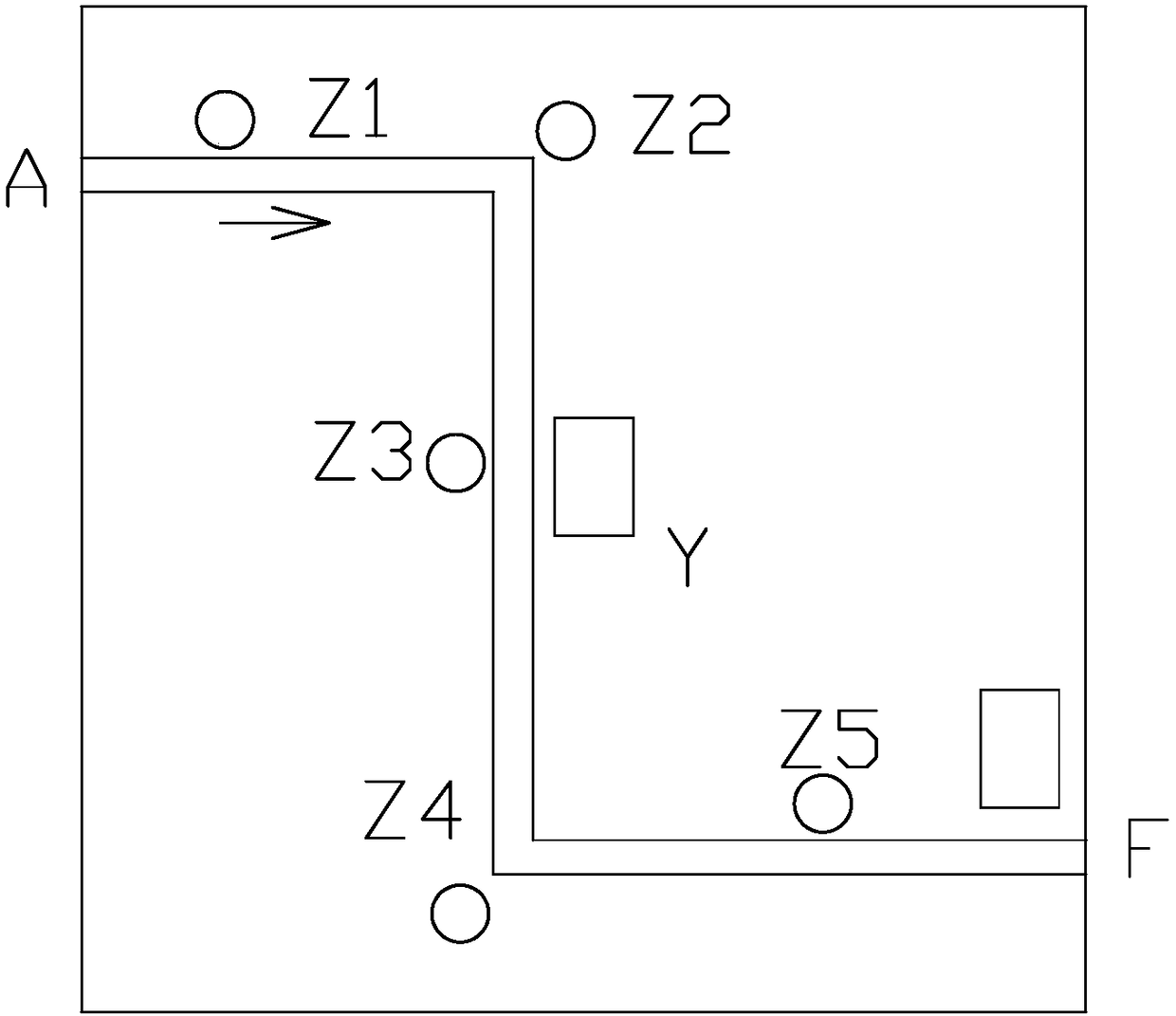
[0150] Original input information: water tank level (a), collected garbage volume (b), current vehicle location information (X), current vehicle speed (c), elapsed operating time (t), elapsed operating mileage (k), designated garbage dumping Point location information (Y), designated water point location information 1 (Z1), designated water point location information 2 (Z2), and job end point location information (F).
[0151] Water tank capacity: L; Garbage box capacity: M
[0152] Data information calculated from raw input information:
[0153] Current remaining water storage = a*ε;
[0154] The current remaining garbage bin capacity = M-b;
[0155] The average amount of water sprinkled per unit time of work β1=(L-a*ε) / t;
[0156] The average amount of water sprinkled per unit of kilometers that has been operated β2=(L-a*ε) / k;
[0157] The average amount of garbage collected per unit time of work γ1=b / t;
[0158] The average amount of garbage collected per unit of kilom...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com