High-precision robot for shoemaking
A high-precision, robotic technology, applied to shoemaking machinery, beating machines, shoe uppers, etc., can solve the problems of manual difficulty in controlling mechanical movement and handling, easy injury and operator hands, time-consuming and labor-intensive problems, to improve accuracy and The effects of stability, labor intensity reduction and convenient operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
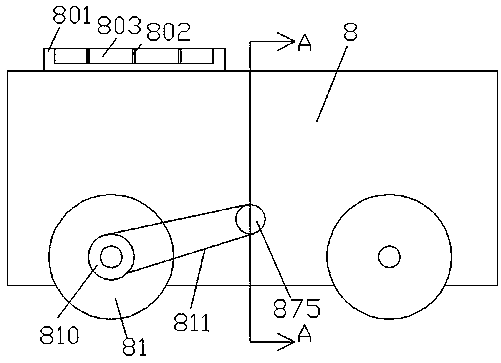
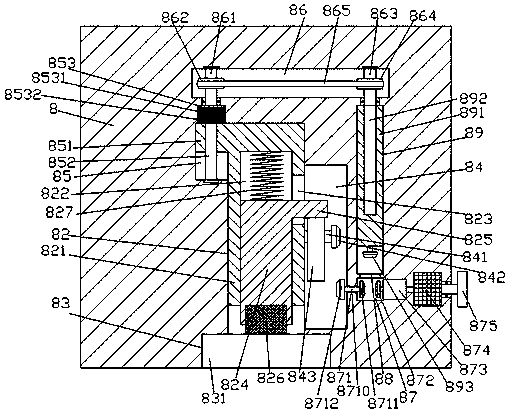
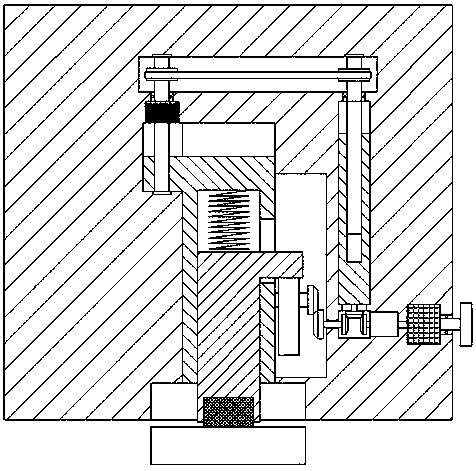
[0020] Such as Figure 1-Figure 4 As shown, a high-precision shoe-making robot of the present invention includes a fuselage 8 and a rolling wheel 81 that is connected to the bottom of the fuselage 8, and a sinking groove 83 is provided in the bottom surface of the fuselage 8. The upper wall of the sinking groove 83 is penetrated with a take-off and landing sliding connection groove 82 extending upwards. The fuselage 8 above the lifting and landing sliding connection groove 82 is provided with a first transfer chamber 86 extending left and right. A second transfer cavity 84 is formed in the inner wall on the right side of the lift-off and landing sliding joint groove 82, and a first guide groove 85 is formed in the top of the left inner wall of the lift-off and landing sliding joint groove 82. The first guide groove The top of 85 is opposite to the bottom of the extension tail tip on the left side of the first transfer chamber 86. The first guide groove 85 is provided with a fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com