Gaussian optics-based focusing type light-field camera parameter calibration method
A light field camera and parameter calibration technology, which is applied in the direction of optical instrument testing, machine/structural component testing, measuring devices, etc., can solve the problems of unknown internal parameters, difficult and accurate image processing and calculation, etc., and achieve the effect of simple mathematical relationship
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 2
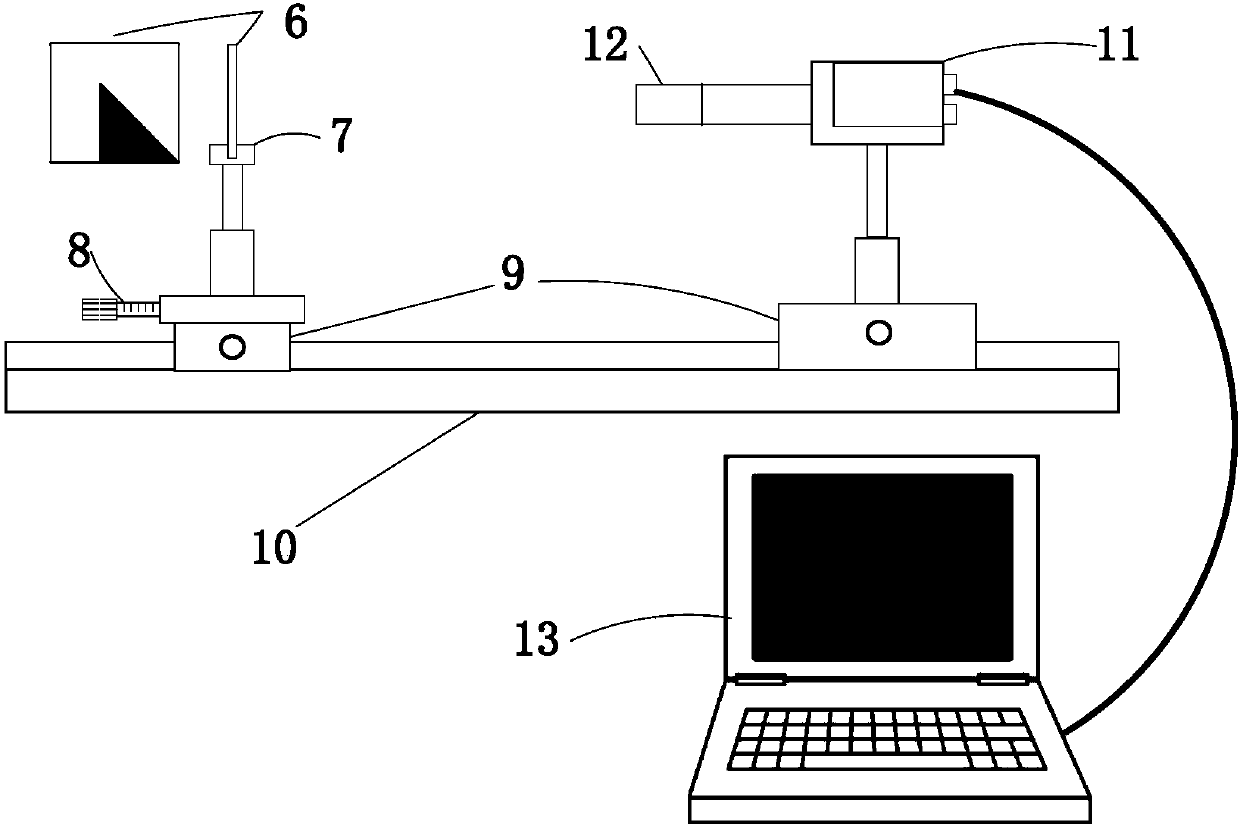
[0051] Embodiment 2 differs from Embodiment 1 in that image data can be automatically processed by a program. The device is basically the same as in Embodiment 1 (such as figure 2 ) are the same, but only a single feature appears on the calibration plate 6 within the field of view of the camera, such as a single corner point, round point, rounded corner, etc. The implementation steps are:
[0052] Steps 1, 2, and 3 are the same as steps 1, 2, and 3 in Embodiment 1; Step 4 is: import the image in step 2 into the image processing program, and perform edge gray gradient judgment on the imaging in the three kinds of lens sub-images, The microlens subimage with the largest gradient is selected. Then select k×k (k is an odd number, and ) diagnostic window, and perform cross-correlation operations on the above sub-images. The center distance △x of the diagnostic window and the center distance Nd of the two microlenses are calculated. Step 5 is the same as Step 5 of Embodiment ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com