Performance evaluation method, device, terminal and storage medium of prosthetic action classifier
A classifier and action technology, applied in the input/output process of instruments, data processing, user/computer interaction input/output, etc., can solve action inconsistencies, lack of quantifiable real-time evaluation methods, and cannot fully reflect real-time Myoelectric prosthetics control the specific situation and other issues to achieve accurate evaluation results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
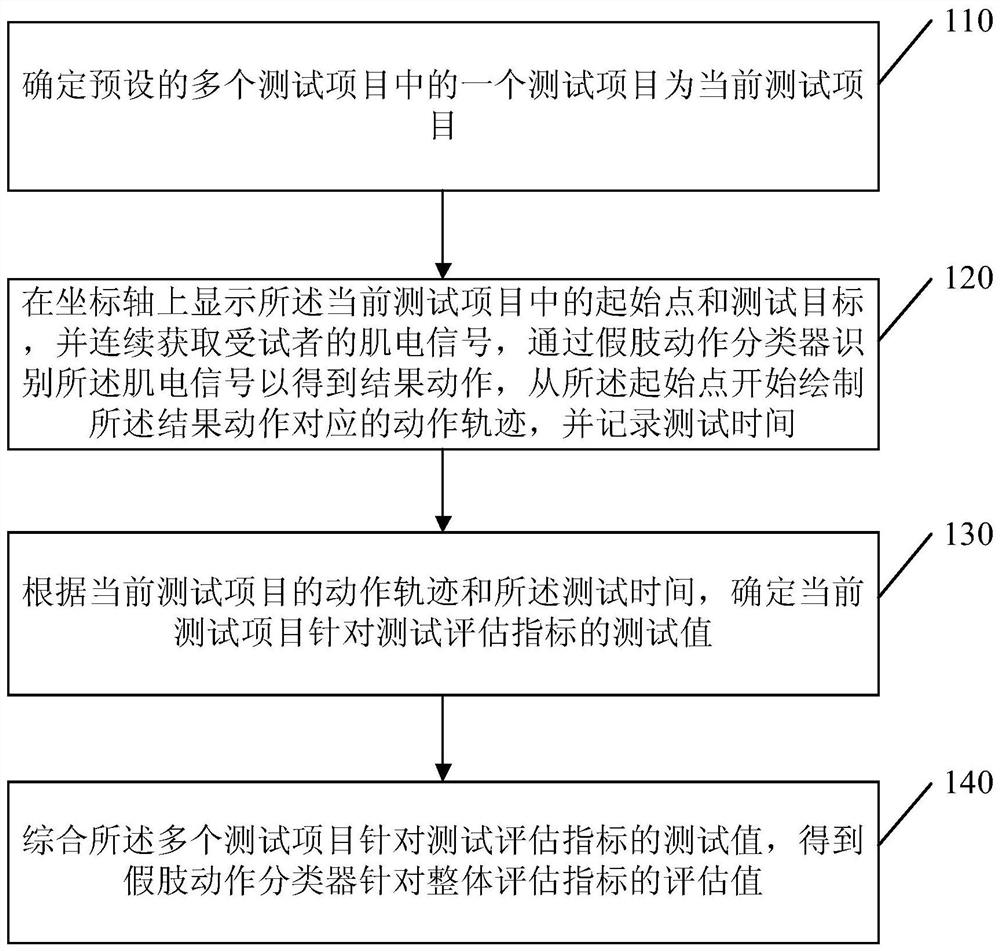
[0029] figure 1 It is a flow chart of a performance evaluation method for a prosthetic action classifier provided in Embodiment 1 of the present invention. This embodiment is applicable to the situation of evaluating the control performance of a prosthetic action classifier in a myoelectric prosthesis. The performance evaluation device of action classifier is carried out, and this device can be realized by software and / or hardware, and generally can be integrated in the terminal such as computer, and this method specifically comprises the following steps:
[0030] Step 110, determining one of the preset test items as the current test item.
[0031] When an amputee first installs a myoelectric prosthesis, in order to adapt the myoelectric prosthesis to the amputee's own muscle characteristics, it is necessary to perform motion training on the prosthetic action classifier in the myoelectric prosthesis. This application is an evaluation of the control performance of a trained pr...
Embodiment 2
[0053] figure 2 It is a flow chart of a performance evaluation method for a prosthetic action classifier provided by Embodiment 2 of the present invention. This embodiment is optimized on the basis of the above-mentioned embodiments, and specifically performs the specific process of obtaining the motion trajectory by testing the current test items. For optimization, the method specifically includes the following steps:
[0054] Step 201, determining one test item among a plurality of preset test items as the current test item.
[0055] Step 202 , display the starting point and test target in the current test item on the coordinate axis, and keep the cursor on the starting point when starting the test, and start timing.
[0056] The prosthetic action classifier is trained from a limited number of actions, so in actual use, there will be situations where the prosthetic action classifier fails to recognize, that is, the intended action of the amputee is misidentified as other a...
Embodiment 3
[0084] Figure 4 It is a schematic structural diagram of a performance evaluation device for a prosthetic action classifier provided in Embodiment 3 of the present invention. This embodiment is applicable to the situation of evaluating the control performance of a prosthetic action classifier in a myoelectric prosthesis. The device can be controlled by a software and / or hardware, and generally can be integrated into a terminal such as a computer. Such as Figure 4 As shown, the performance evaluation device of the prosthetic action classifier described in this embodiment includes: a test item selection module 310 , an action trajectory drawing module 320 , a test value determination module 330 and an evaluation value determination module 340 .
[0085] Wherein, the test item selection module 310 is used to determine that a test item in a plurality of preset test items is the current test item;
[0086] The motion trajectory drawing module 320 is used to display the starting ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com