Four-rotor UAV flight control method based on fractional order power switching law
A quadrotor UAV, flight control technology, applied in attitude control, non-electric variable control, control/regulation system, etc. Robust characteristics and other issues, to enhance the anti-disturbance ability and robustness, high anti-disturbance ability, and the effect of suppressing jitter
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
[0062] figure 1 It is a flow chart of the four-rotor UAV flight control method based on the fractional power switching law of the present invention.
[0063] In this embodiment, as figure 1 As shown, a flight control method for a quad-rotor drone based on a fractional power switching law of the present invention includes the following steps:
[0064] S1. Perform dynamic analysis on the UAV based on the Newton-Euler principle, including mechanical analysis and torque analysis, and establish a UAV dynamic model. The UAV dynamic model includes a translational motion model and a rotational motion model. Among them, the translational motion model for:
[0065]
[0066] Among them, (x, y, z) are the position coordinates of the drone in the ground coordinate system, They are the second-order derivatives of x, y, z, γ, μ, ρ are the three attitude angles describing the UAV, namely the roll angle, pitch angle and yaw angle are figure 1 It is convenient to describe in the, and is uniformly ...
example
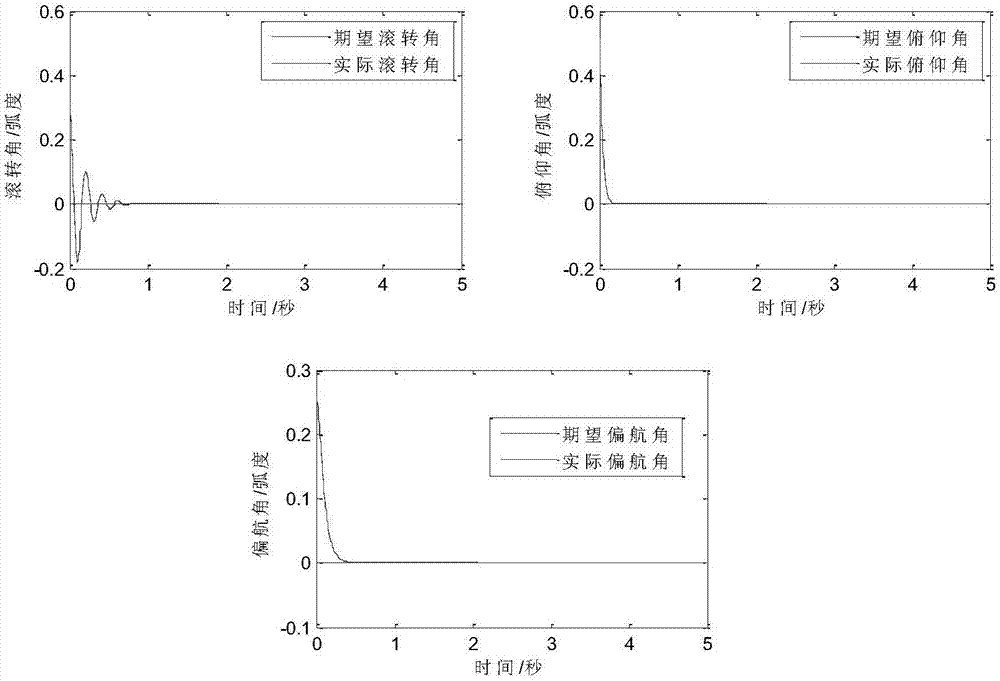
[0120] First, the verification of the fractional-order attitude controller is carried out under the condition that only attitude control is considered. Such as figure 2 , Respectively indicate that when the initial attitude angle (roll angle, pitch angle and yaw angle) of the quadrotor UAV is not 0 radians (initial values are 0.315, 0.513, 0.261 radians respectively), and the expected values are all 0 radians, the quadrotor The attitude angle of the UAV under the controller. It is obvious that all three attitude angles can converge to the desired value and remain stable in a short time-within 1 second.
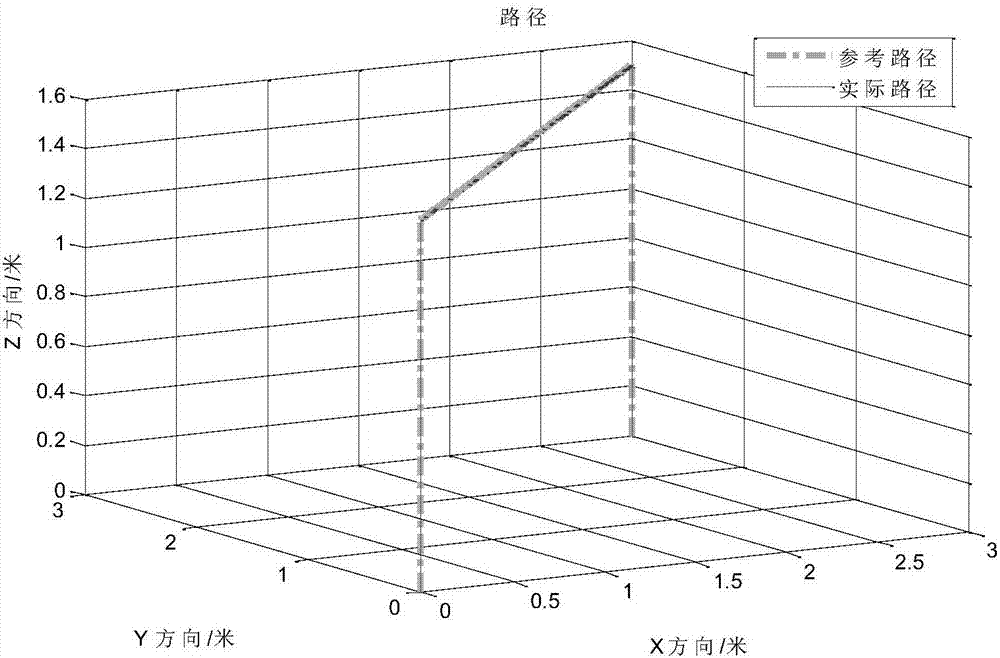
[0121] In certain practical applications, the effectiveness of the fractional attitude controller is verified. The application scenario selected at this time is the vertical take-off-straight flight-vertical landing process, and the formula is used
[0122]
[0123] As a solver from the desired position to the desired angle, where k x , K y It is a normal number. image 3 Th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com