An Integrated Navigation Method for Underwater Robots Based on Long Baseline and Online Beacon Calibration
An underwater robot, integrated navigation technology, used in navigation, mapping and navigation, navigation through velocity/acceleration measurement, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0040] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
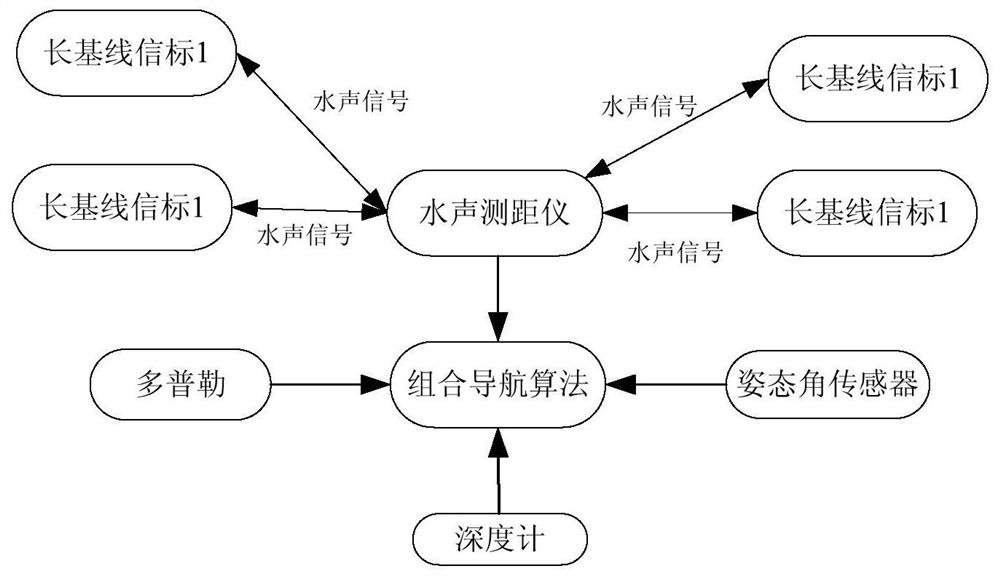
[0041] The hardware requirement of the present invention is an AUV, which is equipped with a depth gauge to measure the depth, equipped with a Doppler to measure the current speed of the submersible, equipped with an attitude angle sensor to measure the current heading angle, pitch angle and roll angle of the submersible, and equipped with a water The acoustic rangefinder measures the distance from the AUV to the long-baseline beacon, and four fixed long-baseline beacons are deployed on the seabed.
[0042] Such as figure 1 As shown, when the AUV is operating underwater, the speed measured by Doppler, the speed measured by the heading angle sensor and the distance from the AUV to the beacon are automatically input into the integrated navigation algorithm, and the underwater position of the AUV is automatically calculated in real time.
[0043...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com