Online adjustment method for control parameters of autonomous aircraft based on MCMC optimized Q learning
A technology for autonomous vehicle and control parameters, applied in control/adjustment systems, adaptive control, general control systems, etc., can solve the overshoot and response delay of autonomous navigation of the vehicle, and cannot solve the rapid adjustment of control parameters of the autonomous vehicle, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
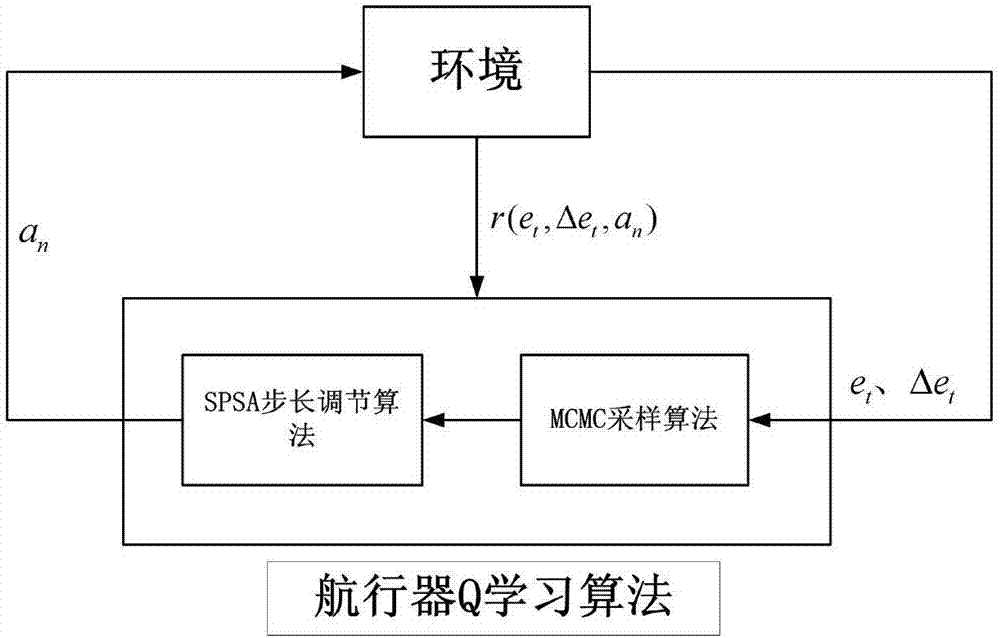
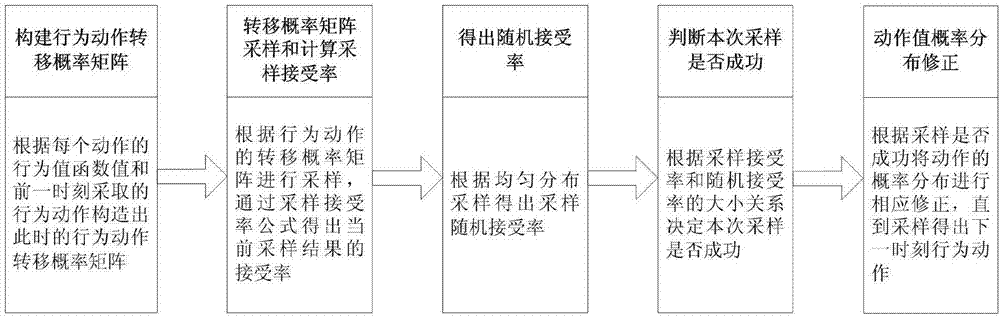
[0070] In this embodiment, the principle of the online adjustment method of autonomous vehicle control parameters based on MCMC optimization Q learning is as follows: figure 1 As shown, the autonomous vehicle receives the error e of the current environment in real time t and error rate of change Δe t , through the MCMC optimization Q learning algorithm to determine the parameter adjustment action a at the next moment in real time n , and finally when the final value function value in the Q learning algorithm is not changing, the optimal value of the control parameters in the current environment is obtained. The MCMC optimization steps in the Q learning algorithm are as follows: figure 2 shown. This method is applied to the field of online adjustment of control parameters of autonomous vehicles, and adapts to the current environment by changing the control parameters of autonomous vehicles.
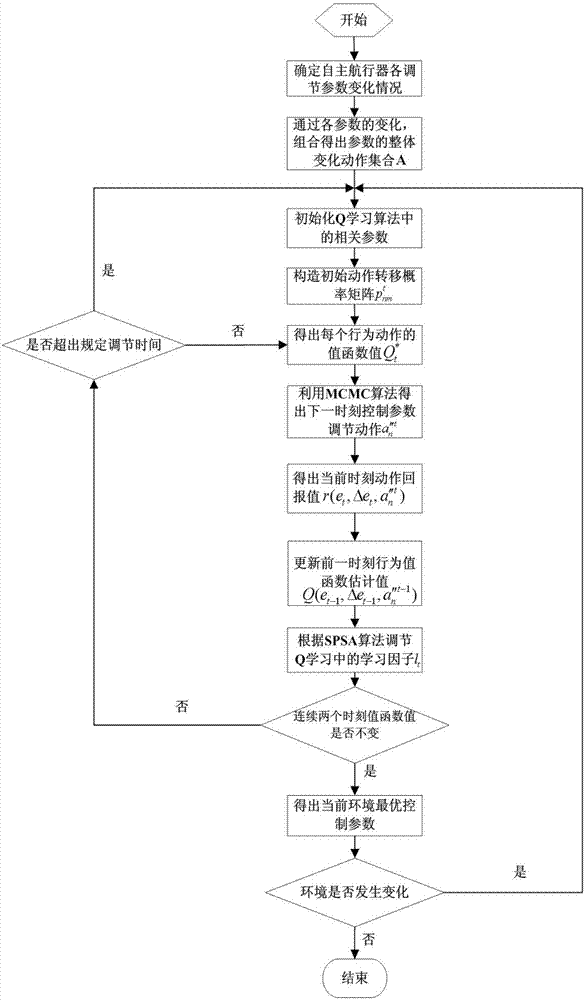
[0071] Such as image 3 As shown, the online adjustment method of the control pa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com