A hierarchical control method for vehicle emergency collision avoidance considering moving obstacles
A control method and obstacle technology, applied in non-electric variable control, two-dimensional position/course control, vehicle position/route/altitude control, etc., can solve the problems of not considering dynamic changes, unsafe and reliable collision avoidance process, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0115] The present invention will be further described in detail below with reference to the drawings and examples.
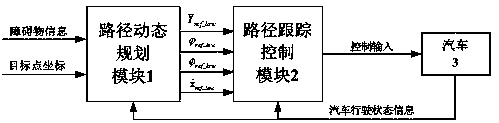
[0116] Such as figure 1 As shown, a hierarchical control method for vehicle emergency collision avoidance considering moving obstacles of the present invention includes the following steps: the path dynamic planning module 1 optimizes the vehicle in real time according to obstacle information collected in real time, target point coordinates, and vehicle driving state information. The lateral displacement reference value, yaw angle reference value, yaw rate reference value, and longitudinal speed reference value of the desired trajectory are input to the path tracking control module 2. At the same time, the path tracking control module 2 collects the current vehicle driving state information in real time Optimize the front wheel angle of car 3 and the slip rate of the four wheels of the car, and control car 3 to avoid collision; among them, the obstacle information...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com