Method for preventing robot from repetitively demonstrating
A technology of robot and robot body, applied in the direction of manipulator, program control manipulator, electrical components, etc., to avoid repeated teaching, improve flexibility and adaptability, and improve application efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further described in detail below in conjunction with the examples.
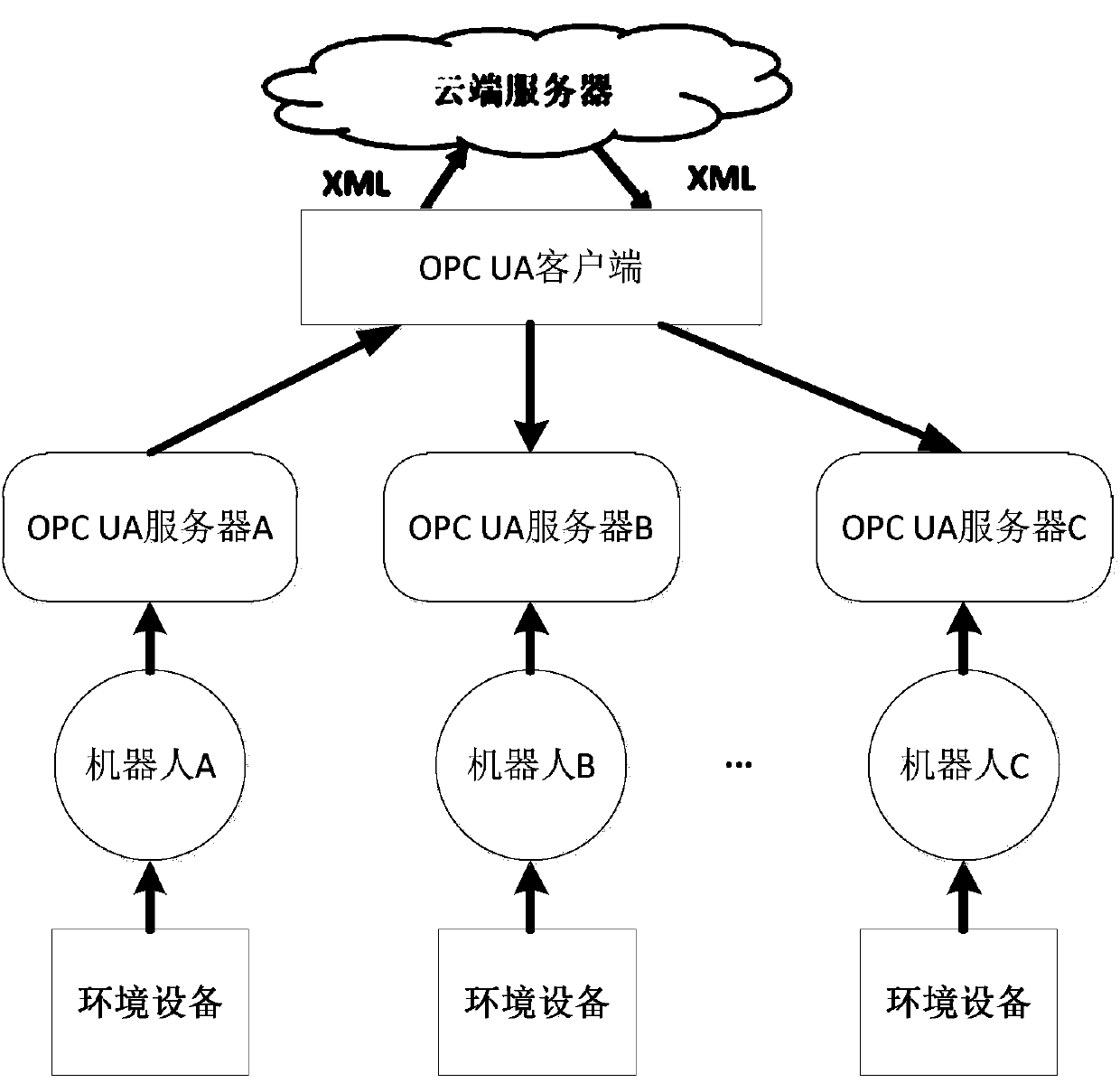
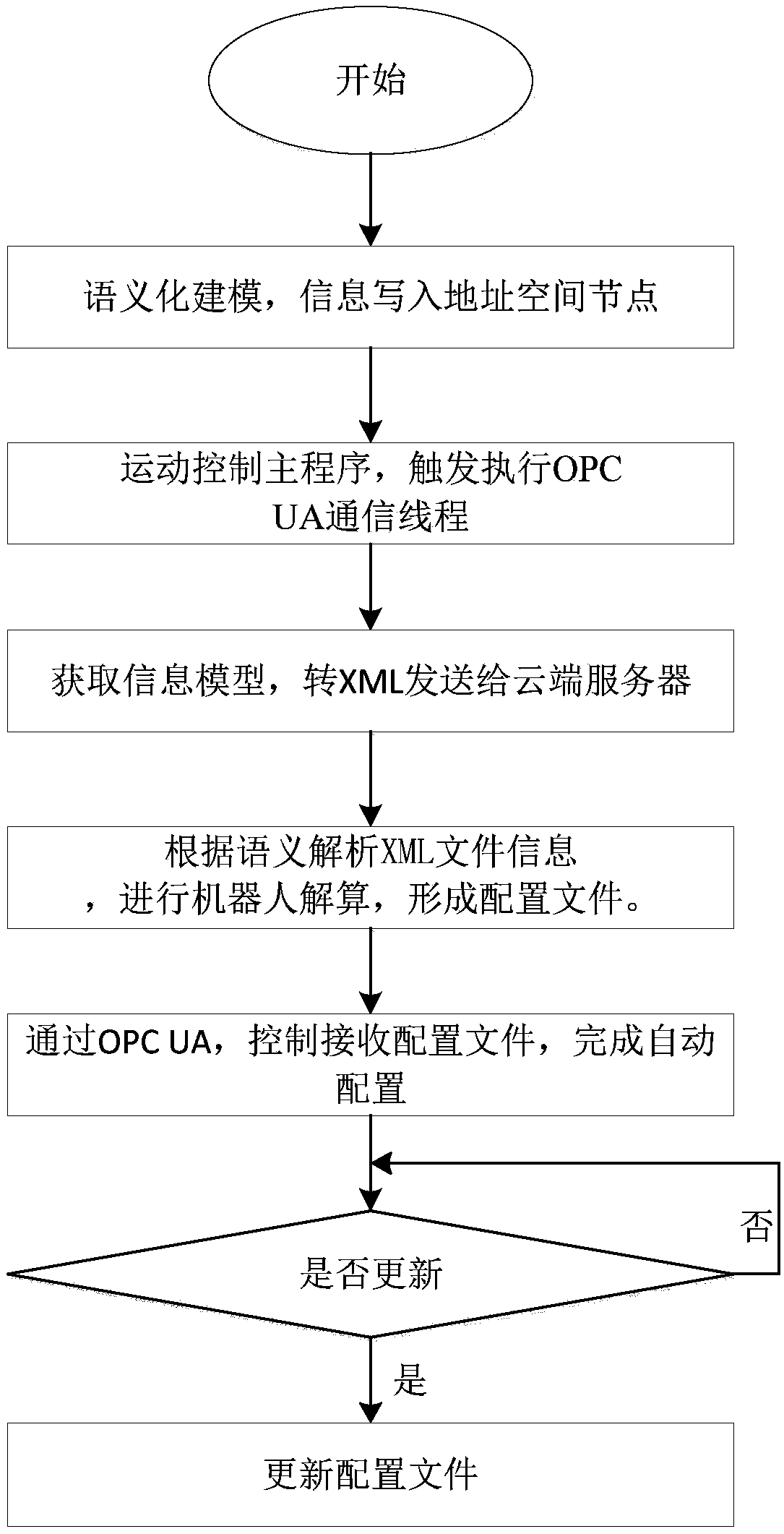
[0029] Such as figure 1 In the multi-robot working scene shown, perform semantic modeling on robot A’s workpiece, fixture, robot body related information, motion parameters, teaching information, etc., and write semantic data into nodes in the server-side address space of OPC UA middle. The OPC UA client accesses the server, parses all information according to the semantic model, and transmits the information to the cloud server in XML form through the HTTP protocol. The cloud server parses the XML file information, performs robot behavior calculation based on the robot ontology model information database, and obtains robot planning instructions through the robot behavior calculation module to form a controller configuration file. When other robots such as robot B need to perform the same operations as robot A, or when the environment equipment changes, there is no need...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com