


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Method and device for generating indoor environment map
An indoor environment and map technology, applied in the field of mobile robots, can solve the problems that the method of generating environmental maps cannot satisfy the problems of easy construction and area segmentation at the same time, and achieve the effect of low efficiency, large amount of calculation and high complexity of path planning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
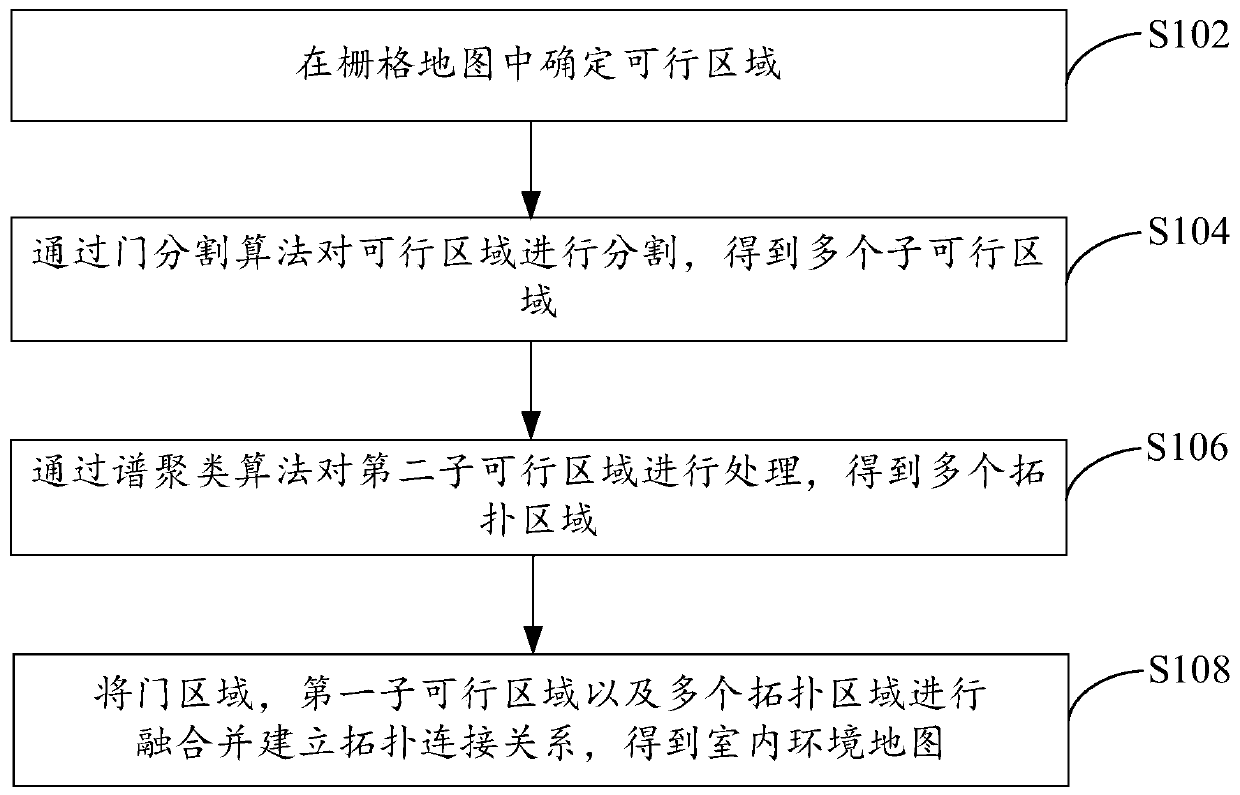
[0076] A method for generating an indoor environment map, refer to figure 1 , the method includes:
[0077] S102. Determine a feasible area in the grid map, wherein the feasible area is an area accessible to the mobile robot, and the feasible area includes a door area;
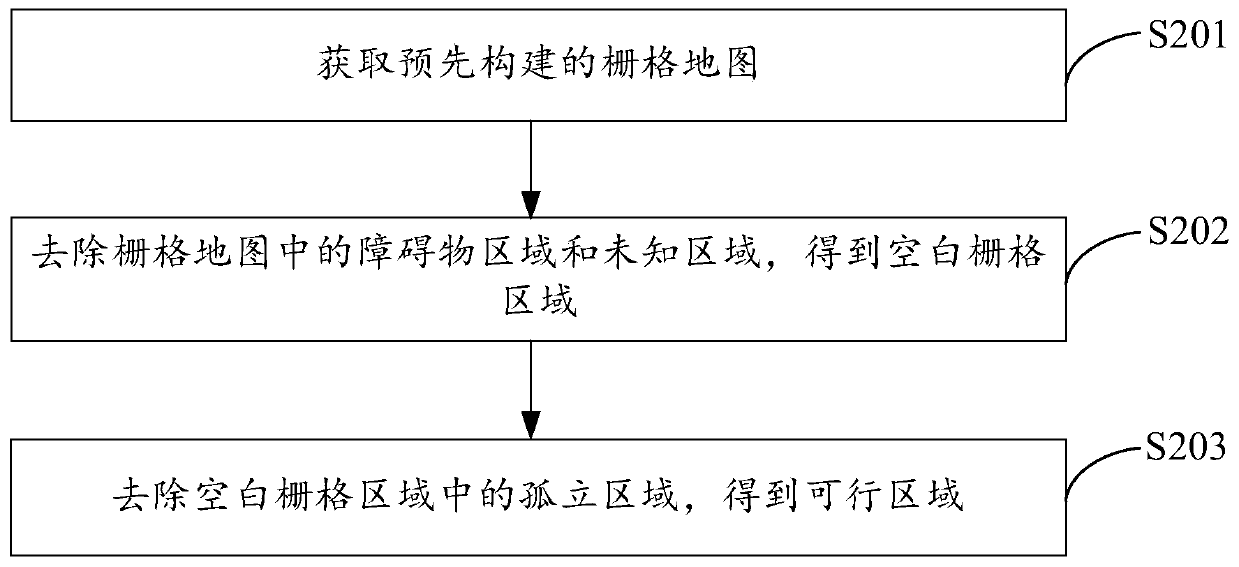
[0078] In the embodiment of the present invention, the topological segmentation is performed on the constructed grid map (that is, in an offline state). The method for constructing the grid map can be constructed by adopting the method for constructing the grid map in the prior art, and the embodiment of the present invention does not repeat the description of the method for constructing the grid map.
[0079] In addition, the present invention is mainly aimed at the topological segmentation of the home environment map of the mobile robot, and may also be applicable to other indoor environment maps, which are not specifically limited in the embodiments of the present invention.
[0080] After obtaining the g...
Embodiment 2
[0174] A device for generating an indoor environment map, refer to Figure 7 , the device consists of:
[0175] A determining module 11, configured to determine a feasible region in the grid map, wherein the feasible region is the reachable region of the mobile robot, and the feasible region includes a door region;
[0176] The segmentation module 12 is used to divide the feasible region by the gate segmentation algorithm to obtain a plurality of sub-feasible regions, and the plurality of sub-feasible regions include: a first sub-feasible region and a second sub-feasible region, wherein the region of the first sub-feasible region The type is known, and the area type of the second sub-feasible area is unknown;
[0177]The processing module 13 is configured to process the second sub-feasible region through a spectral clustering algorithm to obtain a plurality of topological regions, wherein each topological region represents a region category;
[0178] The fusion module 14 is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com