Trajectory controlled indoor four-rotor unmanned aerial vehicle formation demonstration verification platform and method
A four-rotor UAV, trajectory control technology, applied in the direction of non-electric variable control, control/regulation system, three-dimensional position/channel control, etc., can solve the problem of limiting the UAV's ultimate flight capability and not considering the UAV's dynamic characteristics , unable to obtain analytical solutions, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
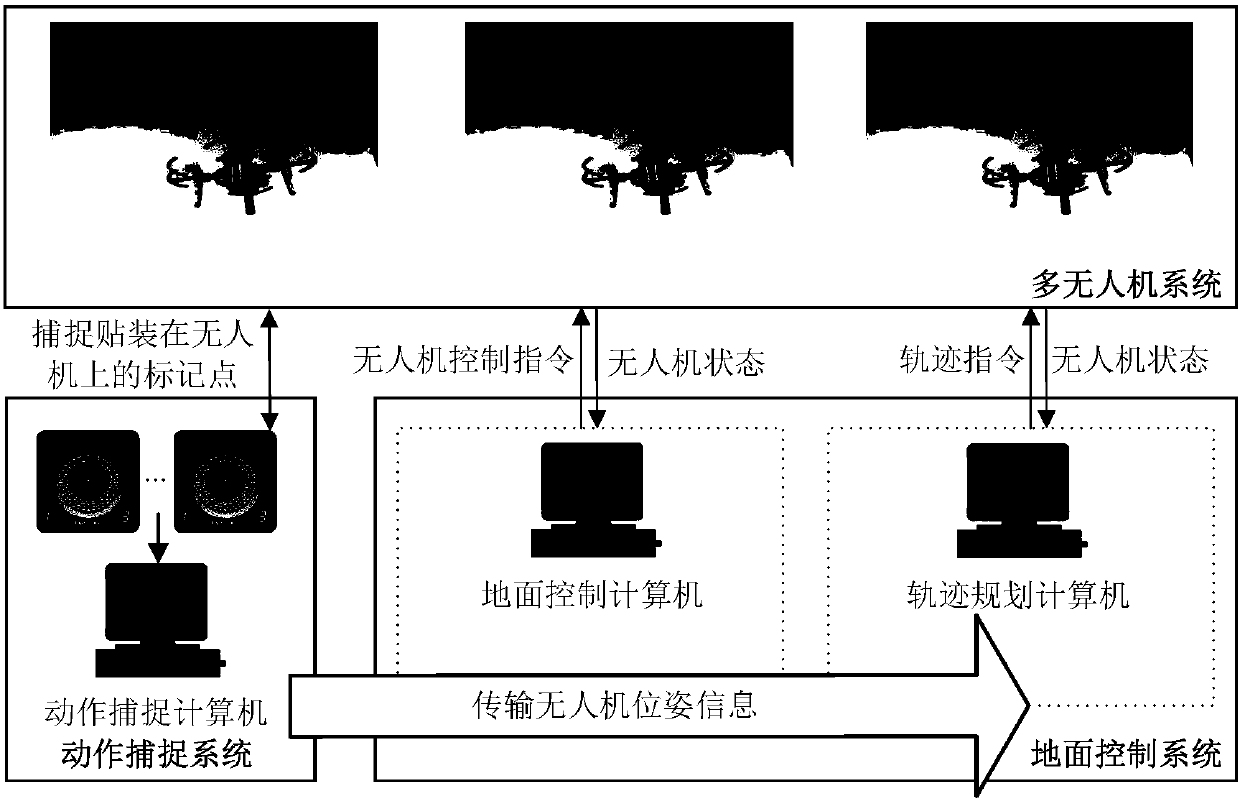
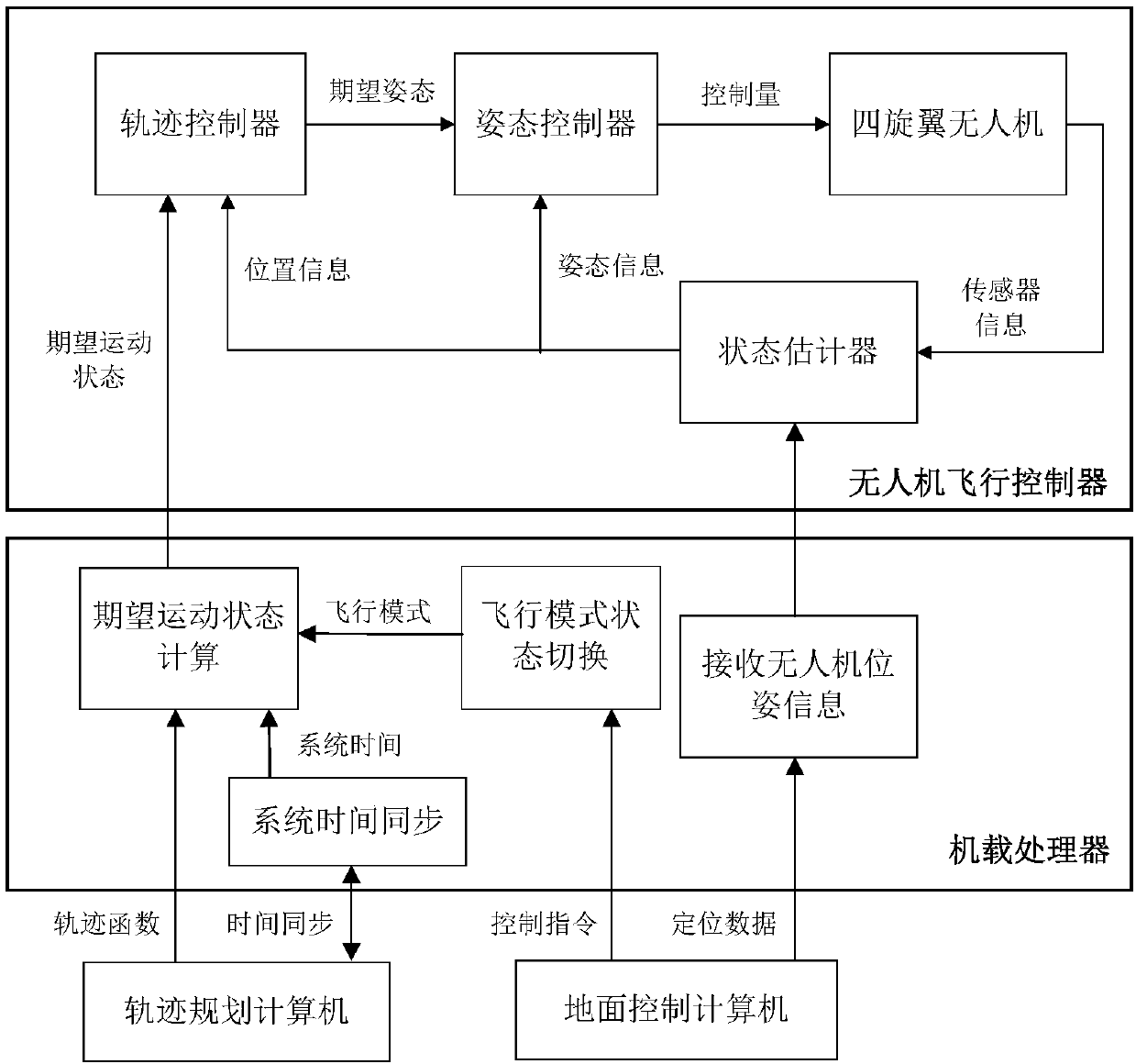
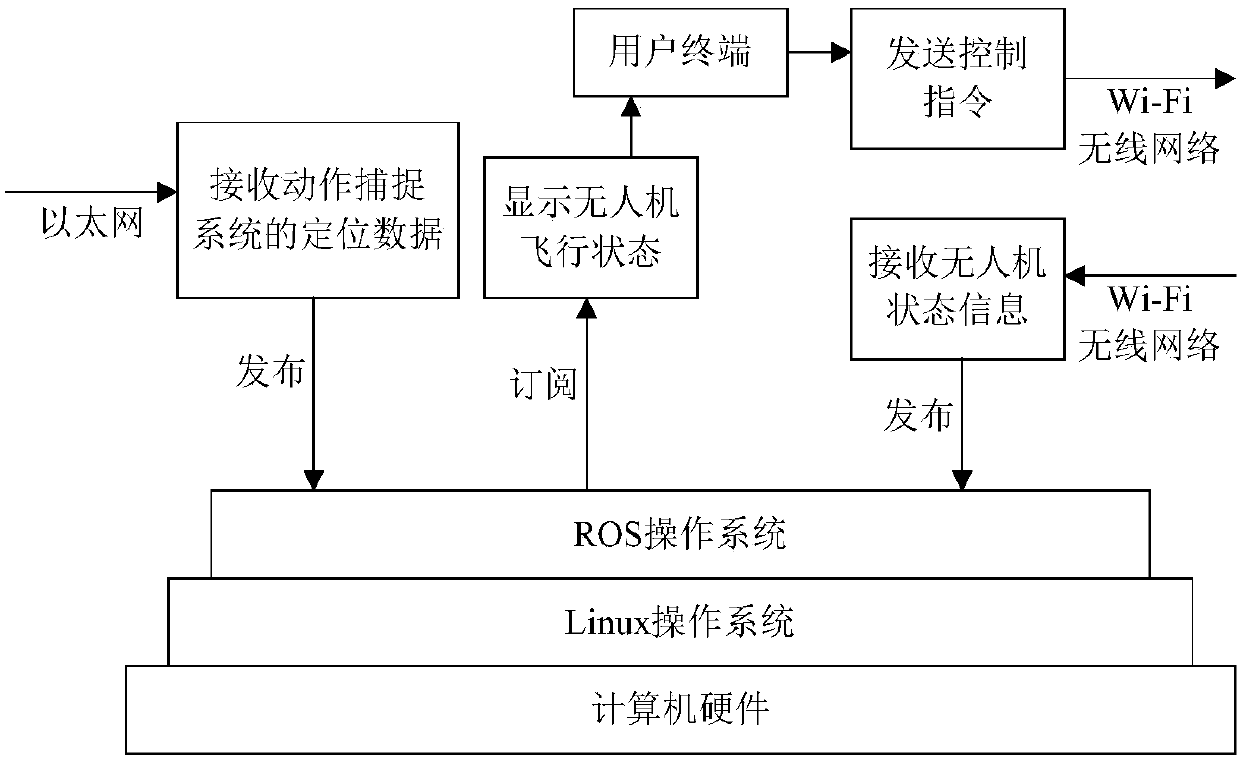
[0070] The purpose of the present invention is to propose a platform design scheme for applying the real-time trajectory planning algorithm to the formation flight demonstration of multiple quadrotor UAVs. Specifically, it combines the distributed formation structure, obtains the flight trajectory and flight status of the adjacent UAV formation through the wireless network, considers the dynamic model of the quadrotor UAV in the actual flight environment, and designs the quadrotor UAV based on the differential flat theory. The man-machine real-time trajectory planning method, combined with the indoor motion capture system, proposed a complete set of indoor multi-rotor UAV formation flight demonstration verification platform design scheme, breaking through the traditional demonstration verification platform in dealing with communication time lag and packet loss. Insufficient, according to the UAV flight status, the formation trajectory planning is carried out in real time, and t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com