


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Automatic butt-joint method and device suitable for wharf oil conveying pipe loading and unloading arm and ship flange
A technology of automatic docking and loading and unloading arms, applied in metal processing equipment, image data processing, instruments, etc., can solve the problems of waste of resources, narrow space, pollution of wharf and water resource environment, etc., to improve work efficiency and economic benefits , the effect of avoiding environmental pollution
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
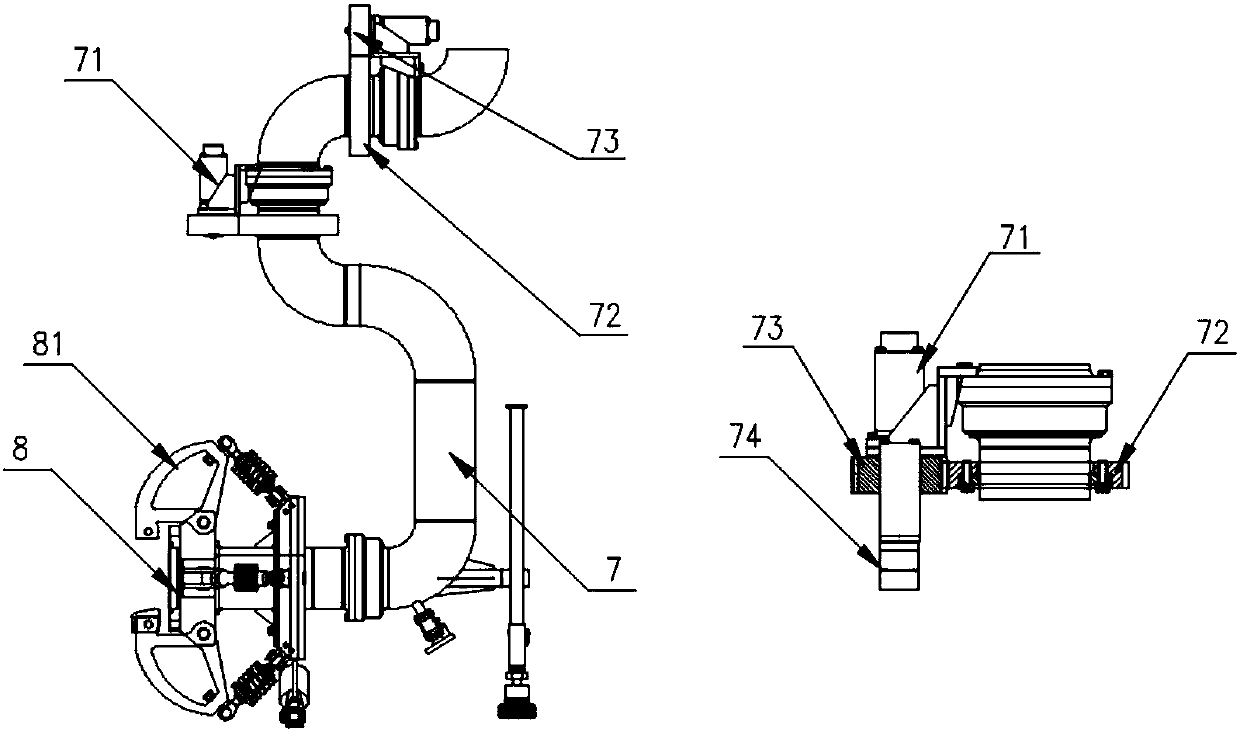
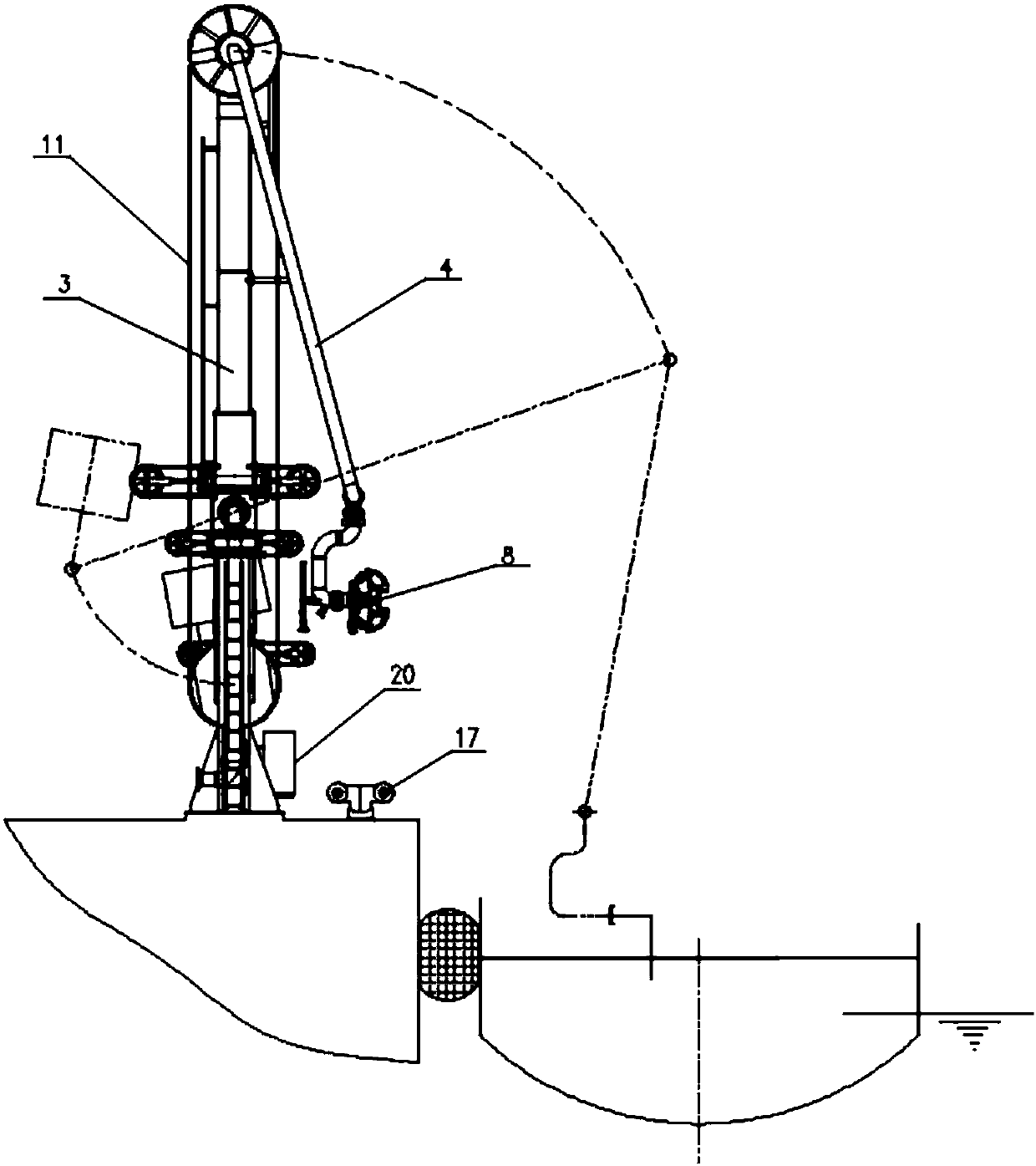
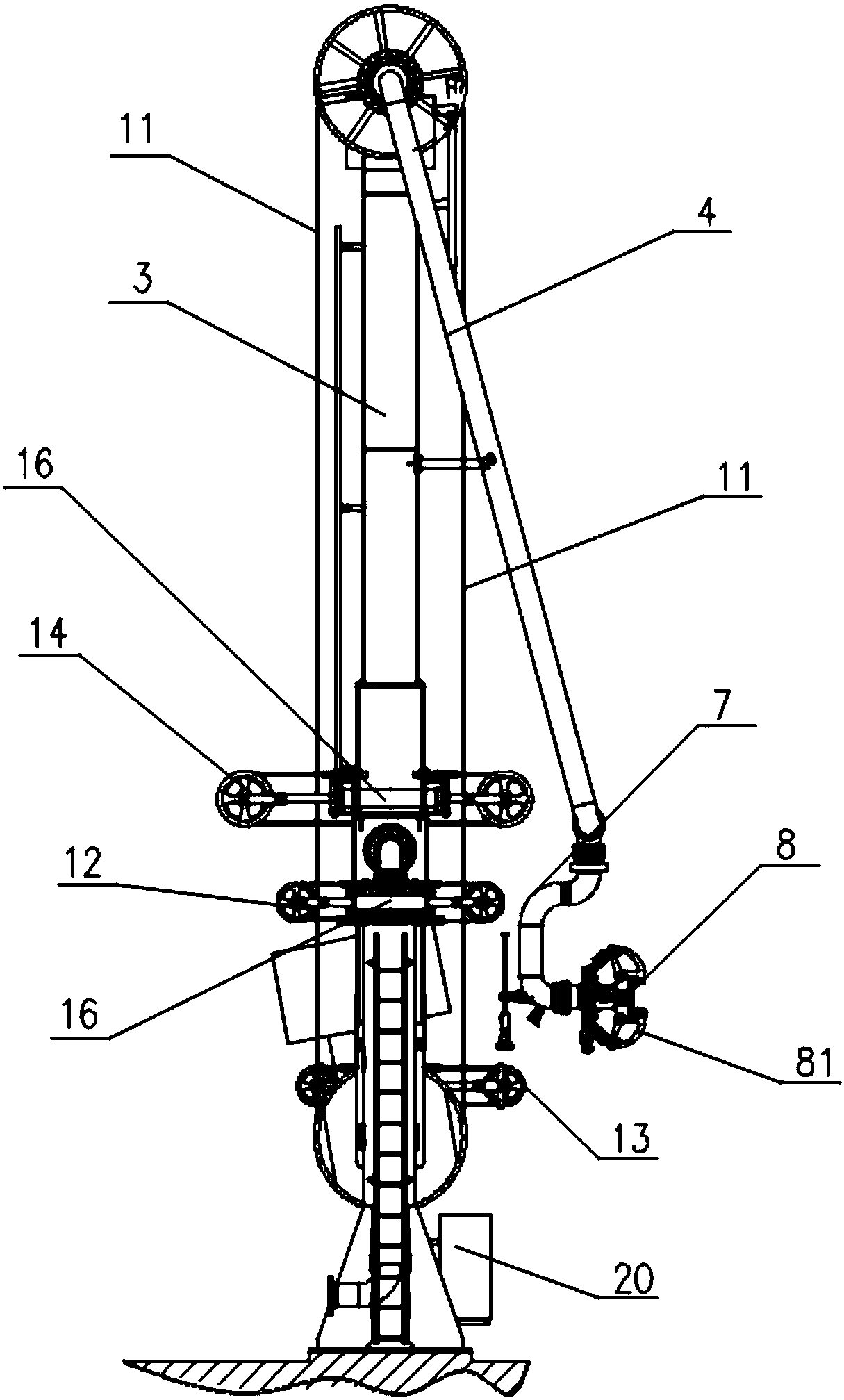
[0041] The loading and unloading arm of the oil pipeline of the present invention is double-positioned by the positioning device, and the driving device is controlled by the drive control system to drive the movement of the outer arm and the inner arm, so as to realize the precise docking of the hydraulic quick connector at the end of the outer arm of the oil pipeline arm and the flange of the ship header. As shown in Figure 1, it is suitable for the automatic docking equipment between the loading and unloading arm of the wharf oil pipeline and the flange of the ship, including: the loading and unloading arm of the oil pipeline, the base 1, the column 2, the inner arm 3, the outer arm 4, the shaft box 5, the support box 6, Three-dimensional joint 7, swing cylinder 71, large gear 72, pinion 73, encoder 74, hydraulic quick connector 8, adjustable outrigger 81, detachable elbow 9, maintenance platform 10, wire rope mechanism 11, horizontal driving device 12. Outer arm driving devi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com