Positioning method and positioning device of mobile robot, mobile robot and storage medium
A technology of mobile robots and positioning methods, which is applied in the direction of measuring devices, satellite radio beacon positioning systems, instruments, etc., and can solve the problems of low precision and large positioning errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
[0027] The first embodiment of the present invention provides a positioning method of a mobile robot. The method can be executed by a positioning device of a mobile robot, where the device can be implemented by software and / or hardware, and generally can be integrated in the mobile robot. figure 1 It is a schematic flow chart of the positioning method of a mobile robot provided in the first embodiment of the present invention, such as figure 1 As shown, the method includes:
[0028] S101. Obtain original positioning information of the mobile robot, where the original positioning information includes the first detected pose output by the main positioning module, the second detected pose output from each positioning module, and the position of the mobile robot in the previous positioning period. One posture.
[0029] Among them, the first detected pose may be the pose of the mobile robot detected and determined by the main positioning module of the mobile robot at the current moment;...
Embodiment 2
[0039] figure 2 This is a schematic flow chart of a positioning method for a mobile robot provided in the second embodiment of the present invention. This embodiment is optimized on the basis of the above-mentioned embodiment. In this embodiment, "using the first fusion algorithm to compare the first Detect the pose and the previous pose and perform fusion calculation to obtain the main fusion pose of the main positioning module. "Optimization is to obtain the current speed of the mobile robot. The current speed includes the current linear velocity and the current angular velocity. Calculate the theoretical pose of the mobile robot in the current detection cycle according to the current speed and the previous pose; use the first fusion algorithm to perform fusion calculation on the theoretical pose and the first detected pose, To obtain the main fusion pose of the main positioning module, the first fusion algorithm is an extended Kalman filtering algorithm.
[0040] Further, the...
Embodiment 3
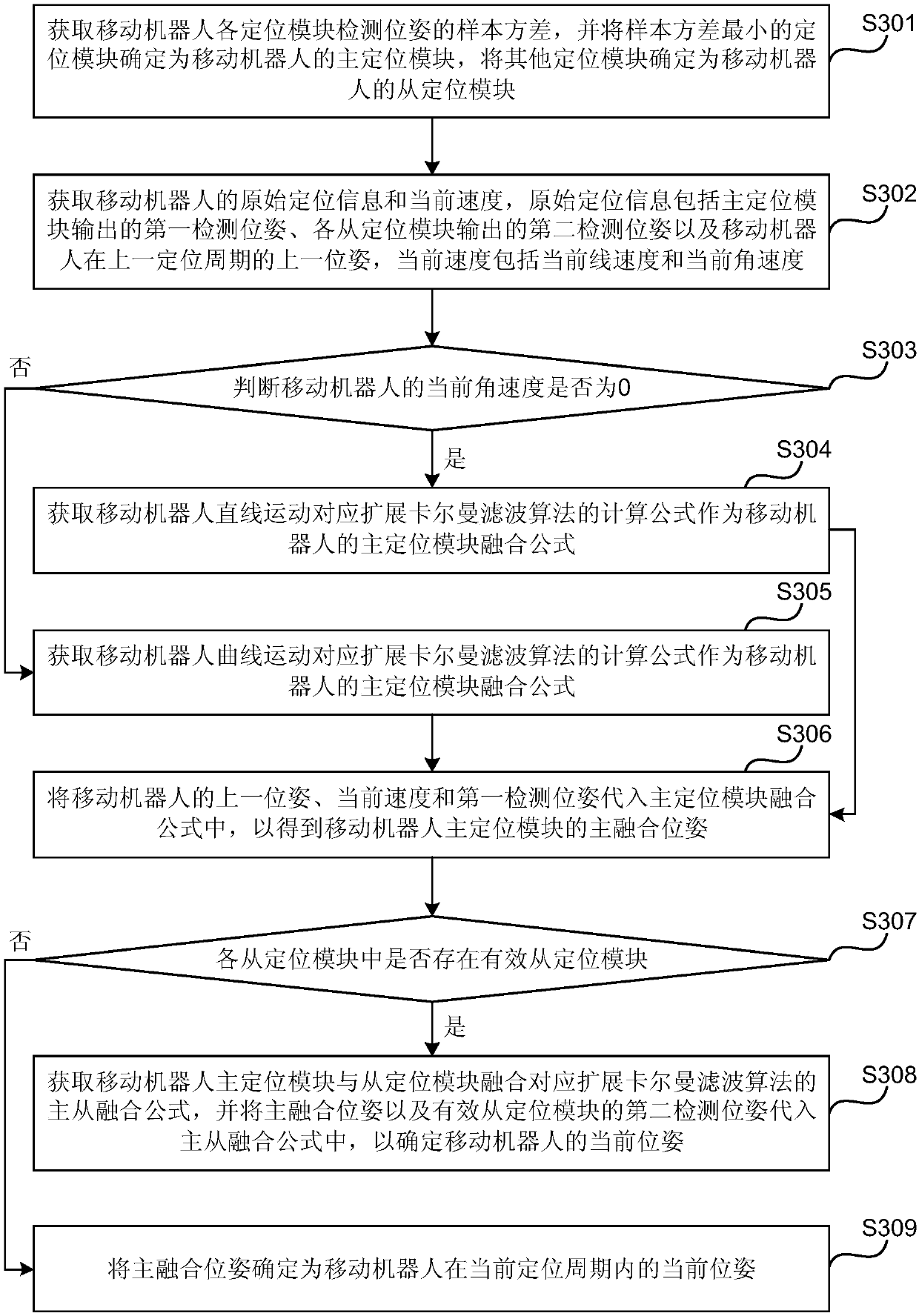
[0067] The third embodiment of the present invention provides a preferred positioning method of a mobile robot. The method can be executed by a positioning device of a mobile robot, where the device can be implemented by software and / or hardware, and generally can be integrated in the mobile robot. image 3 This is a schematic flowchart of a preferred positioning method for a mobile robot provided in the third embodiment of the present invention, such as image 3 As shown, the method includes:
[0068] S301. Obtain sample variances of the poses detected by each positioning module of the mobile robot, and determine the positioning module with the smallest sample variance as the master positioning module of the mobile robot, and determine other positioning modules as the slave positioning modules of the mobile robot.
[0069] S302. Obtain original positioning information and current speed of the mobile robot, where the original positioning information includes the first detected pose ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com