Full-time vehicle detection and tracking method and system in video based on Kalman filter and deep learning
A Kalman filtering and deep learning technology, applied in image analysis, instrumentation, computing, etc., can solve the problems of short-term lost targets that cannot continue to be tracked, target features cannot be updated in time, and cannot be tracked.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0069] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
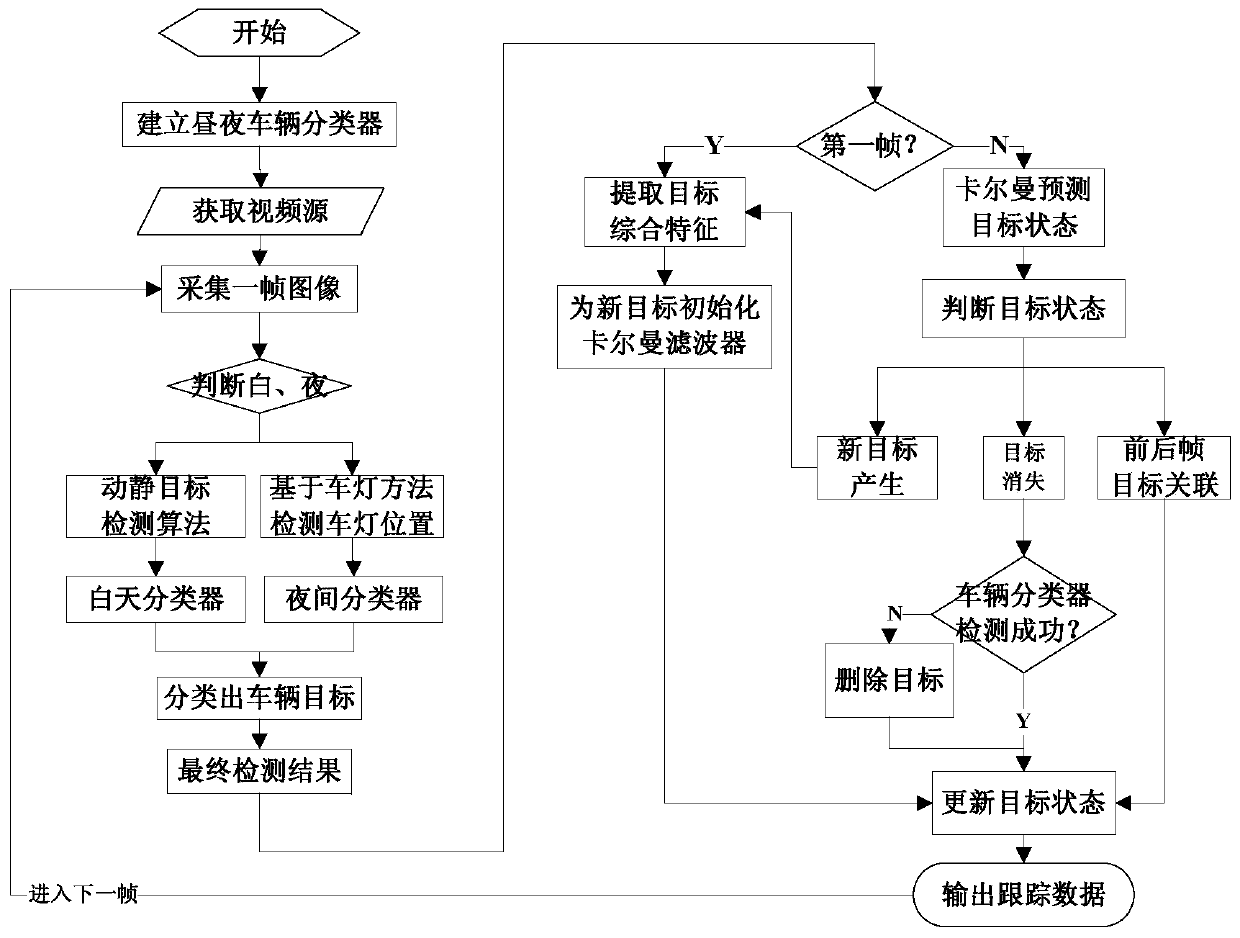
[0070] A full-time vehicle detection and tracking method and system in video based on Kalman filtering and deep learning, comprising the following steps:
[0071] Step 1: Using the method of deep learning, establish a sample library of night and daytime vehicle images, use the CAFFE framework to train the deep learning CNN model offline, and establish a daytime vehicle classifier and a nighttime infrared classifier;
[0072] Step 2: Collect a frame of image from the video source, judge whether the current time is day or night, enter step 3 during the day, and enter step 4 at night;
[0073] Step 3: During the day, use the moving and still target detection method to obtain the moving and still targets of the current frame, use the daytime classifier to separate the vehicle targets, that is, use the background difference method to detect the mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com