A bionic tension cushioning foot-ankle system
A technology of tension and tension springs, which is applied in the field of bionic tension cushioning foot-ankle systems, can solve problems such as poor cushioning performance, avoid friction loss and impact damage, ensure stable balance, and ensure structural stability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
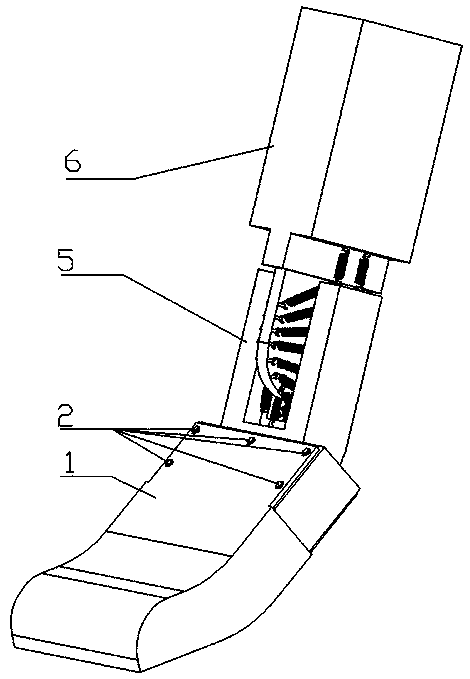
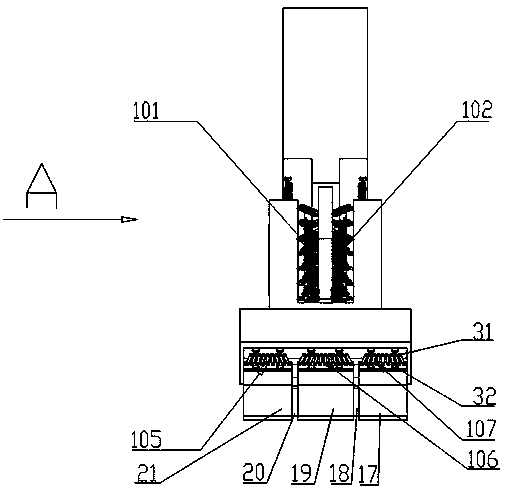
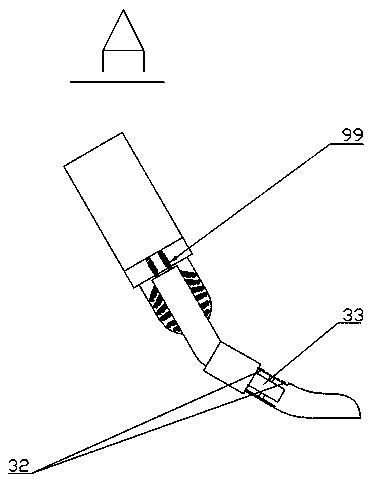
[0021] see figure 1 , figure 2 , image 3 , Figure 4 As shown, the present invention includes a first finger 21, a second finger 19, a third finger 17, a sole portion 5, a leg portion 6, a seventh tension member body 37, a first rubber block 20, and a second rubber block 18 , the third rubber block 33, the first tension member group 105, the second tension member group 106, the third tension member group 107, the fourth tension member group 108, the fifth tension member group 109, the sixth tension member group The tension member group 110 , the first tension spring group 101 , the second tension spring group 102 , the third tension spring group 103 , the fourth tension spring group 104 , the fifth tension spring group 99 , and the foot jacket 1 . Wherein, the first tension member group 105 is composed of nine tension member units; the second tension member group 106 is composed of eleven tension member units; the third tension member group 107 is composed of nine tension...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com