Multi-robot full-coverage task allocation method
A task allocation and multi-robot technology, applied in the field of task allocation based on genetic algorithm, can solve the problem that the allocation method cannot obtain a higher quality approximate optimal solution
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
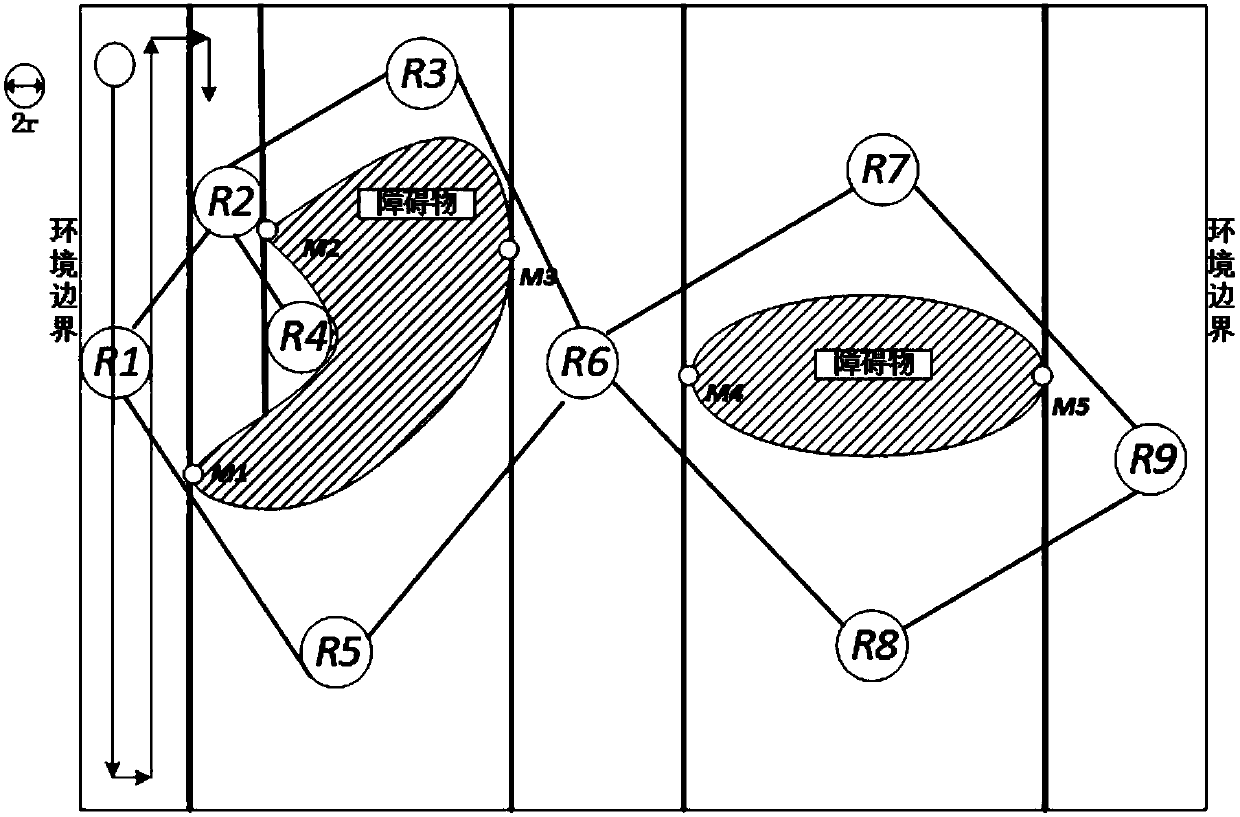
[0075] figure 1 It is a schematic diagram of the two-dimensional modeling of the real environment constructed by the present invention. Such as figure 1 as shown, figure 1 It is a modeling of a real environment. M1-M5 respectively represent Morse points, vertical lines represent Morse straight lines, R1, R2, R3, R4, R6, R7, R8, R9 represent small regions drawn by Morse straight lines from the entire large region. A possible 3-partition is {{R1}, {R2, R3, R4, R6, R7}, {R5, R6, R8, R9}}.
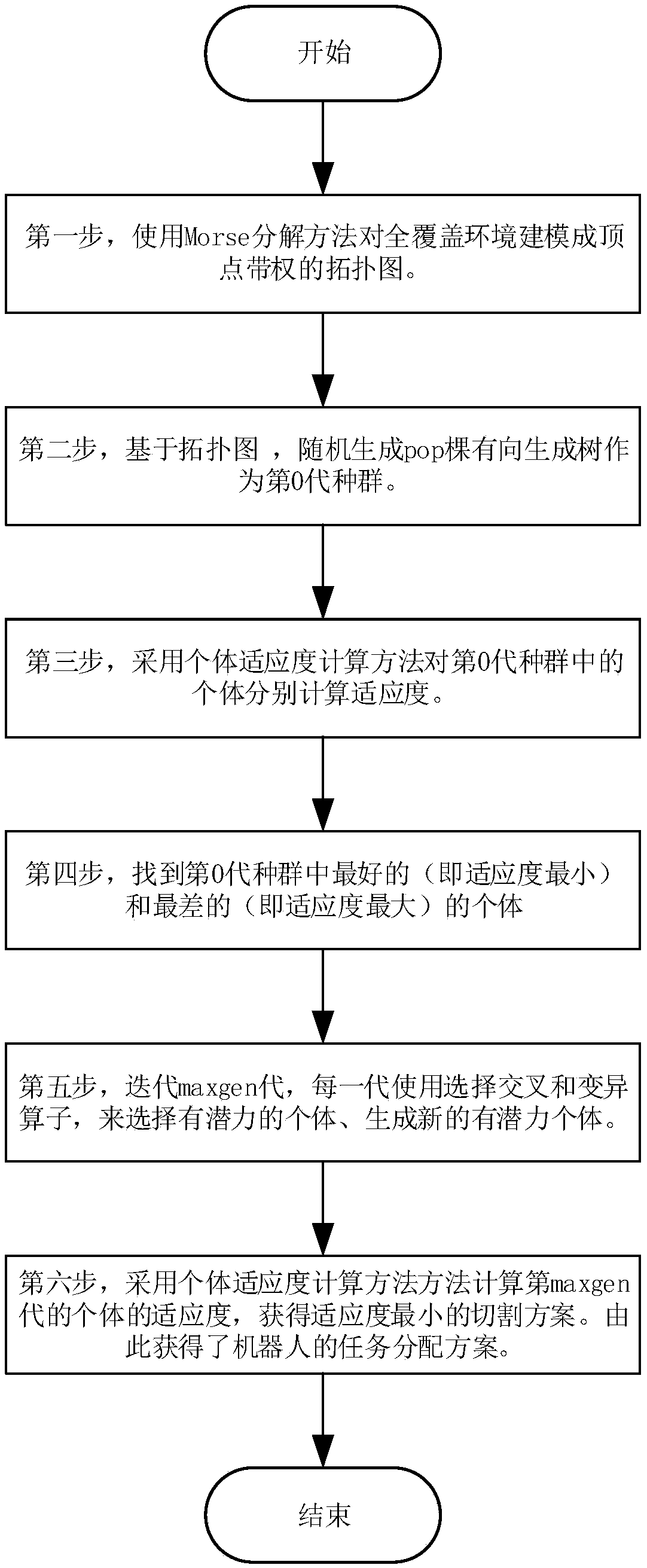
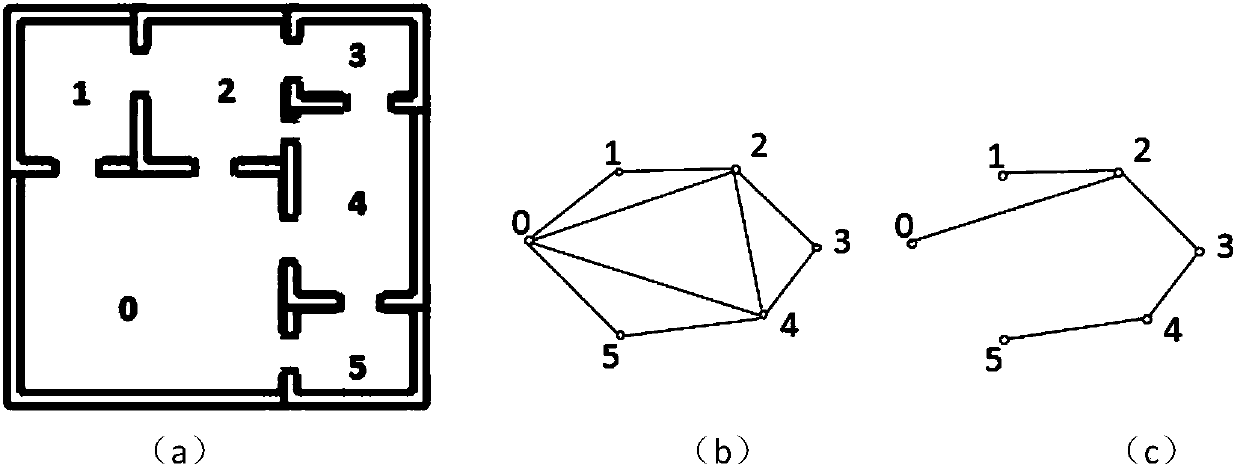
[0076] figure 2 It is the overall flowchart of the present invention. image 3 (a) is an example of a real full-coverage environment, which is used to illustrate the specific implementation manner of the present invention. image 3 (a) The environment shown is a closed room, and the thick black frame represents the wall, which is impassable; image 3 (b) is image 3 (a) The original topological map; image 3 (c) is based on image 3 (b) A random tree that may be generated.
[0077]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com