An electronic cabin of an operating underwater robot
A technology of underwater robots and electronic cabins, applied in the field of electronic cabins, can solve problems such as long production time, high cost of underwater robots, and poor scalability, so as to reduce complexity, facilitate streamlined production, and save time and cost Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0029] The present invention will be further described below in conjunction with the accompanying drawings.
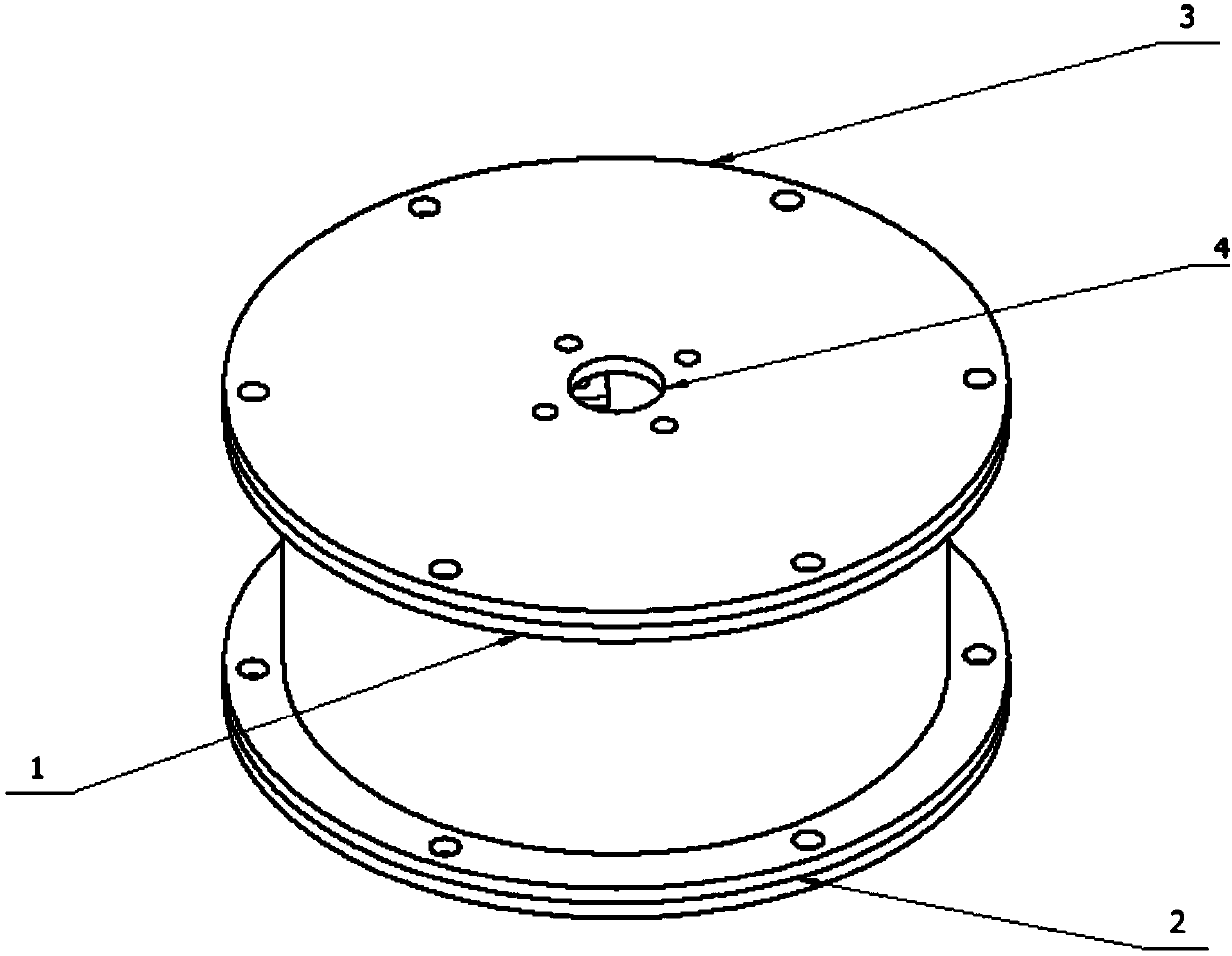
[0030] An electronic cabin of an operating underwater robot includes a pressure-resistant housing and an internal control circuit.
[0031] The pressure-resistant shell includes a main body 1, a lower end cover 2, and an upper end cover 3; the upper end cover 3 and the lower end cover 2 are fixed to the upper and lower ends of the main body 1 by bolts.
[0032] The upper end cover 3 has an upper end cover through hole 4 for installing the upper end cover watertight joint. One end of the upper end cover watertight joint is connected to the external battery pack to supply power for the electronic cabin, and the other end is connected to the internal control of the pressure-resistant housing. The power supply circuit pins of the circuit are connected to supply power to the control circuit.
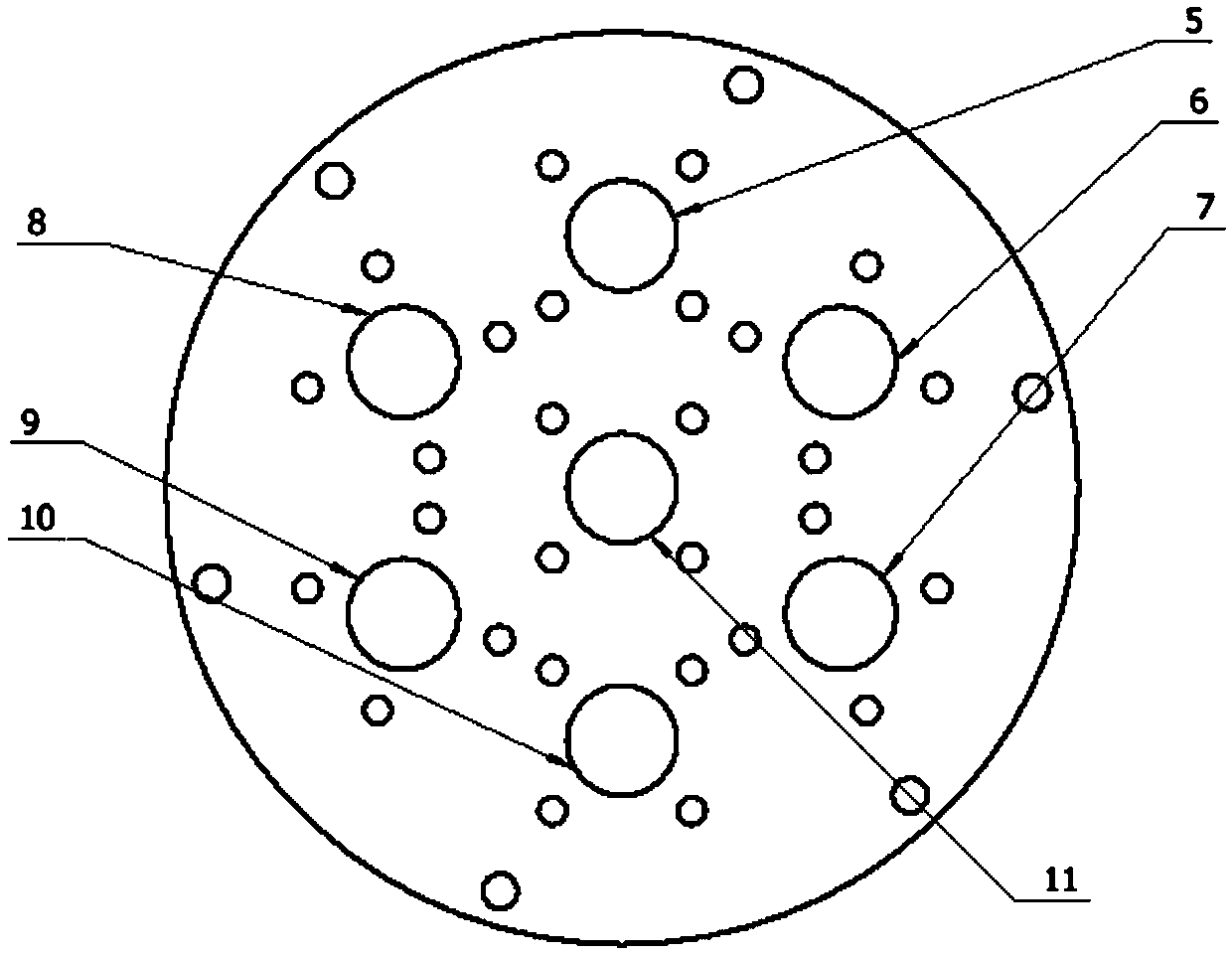
[0033] The central through hole 11 is left in the middle of the lower end cover ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com