Obstacle avoidance method and system of UAV formation under time-varying network topology
A time-varying network and UAV technology, applied in the field of multi-UAV formation, can solve the problems of difficult implementation, high real-time requirements of multi-aircraft formation system, and high number of iterations, to ensure integrity, reduce communication overhead and effect of time spent
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
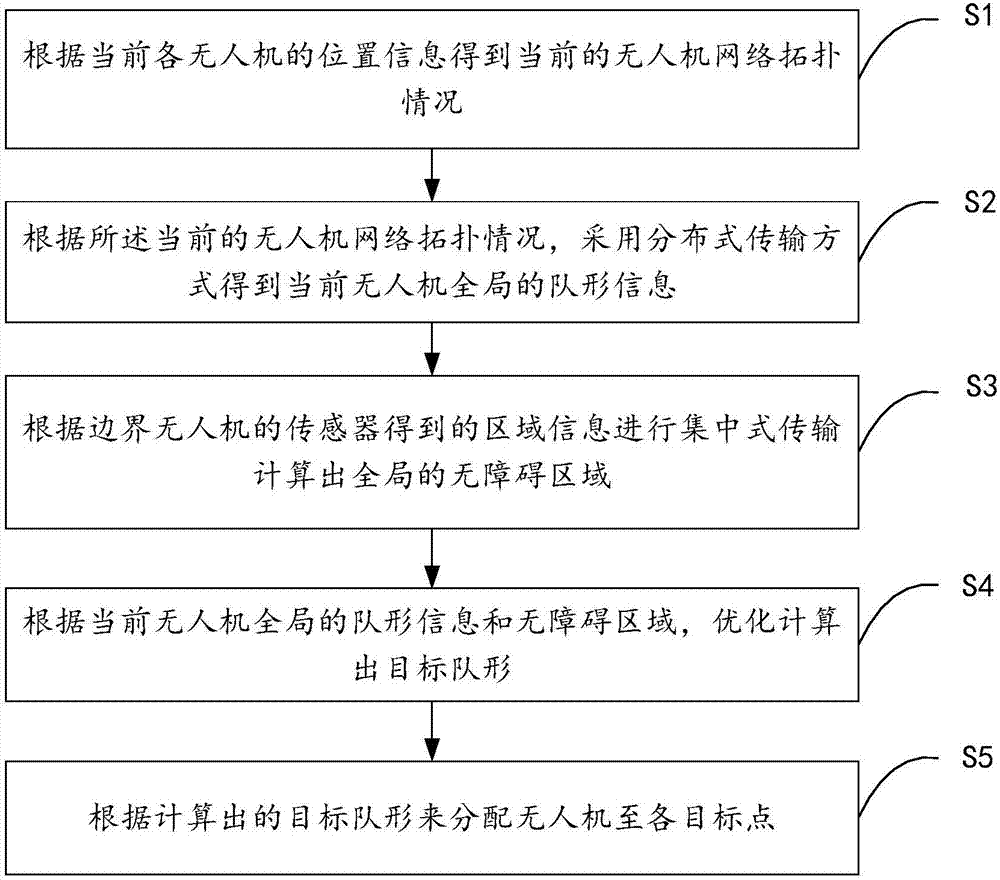
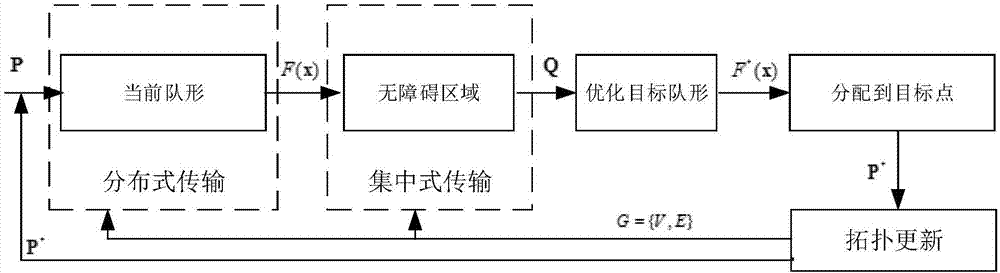
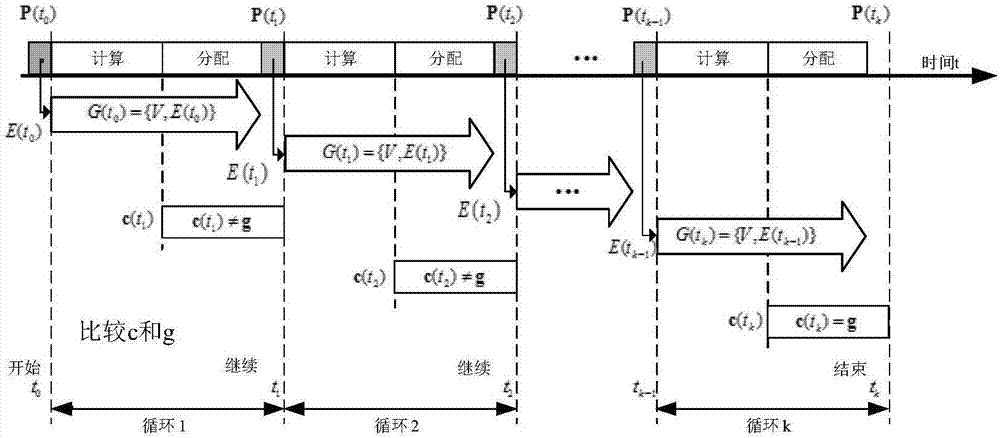
[0041] The present invention applies multi-UAV formations under communication constraints, based on distributed and centralized information transmission methods, and uses a sliced topology model to propose an obstacle avoidance algorithm for UAV formations under time-varying topology. In the stage, different information transmission methods are adopted according to the transmission information. At the same time, the UAV formation algorithm is designed as a whole to ensure the overall link stability of the formation, and a multi-machine formation obstacle avoidance with low communication overhead and low delay cost is designed. algorithm.
[0042] Specifically, such as Figure 1a As shown, the present invention proposes a UAV formation obstacle avoidance method under a time-varying network topology, including:
[00...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com