Spacecraft formation attitude limited time cooperation control method under complicated constraint condition
A technology of attitude control and constraint conditions, applied in the field of control science, can solve problems such as the inability to coordinate the attitude control of spacecraft formations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
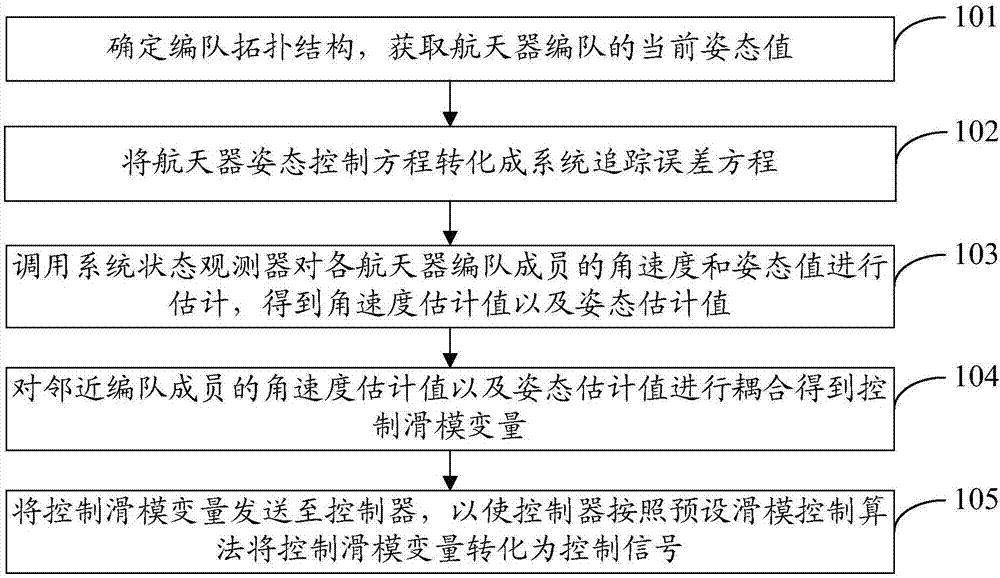
[0017] refer to figure 1 , shows a flow chart of steps of a method for finite-time cooperative control of spacecraft formation attitude under complex constraint conditions according to an embodiment of the present invention.
[0018] The finite-time cooperative control method of spacecraft formation attitude under the complex constraints of the present embodiment includes the following steps:
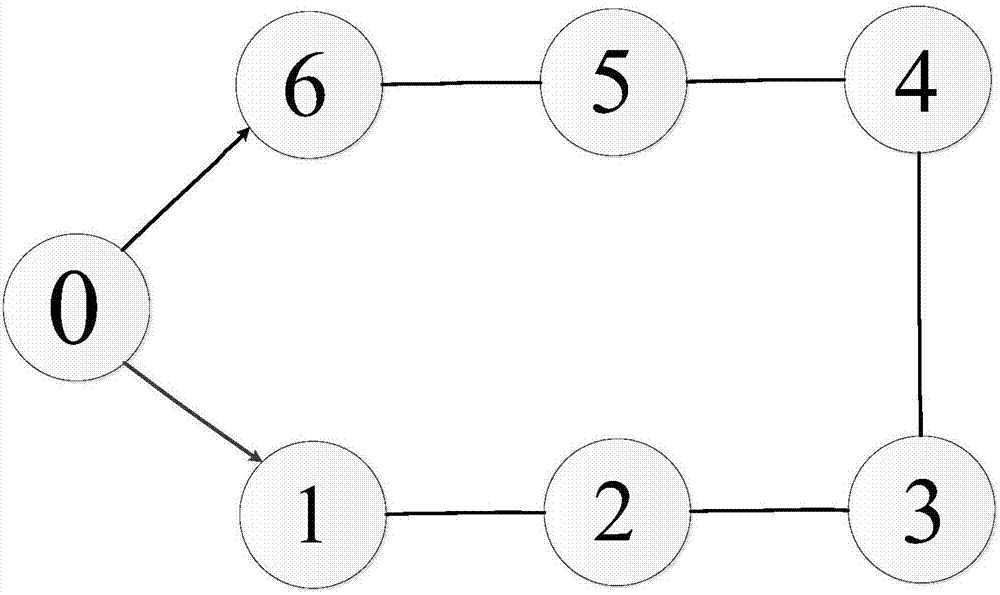
[0019] Step 101: Determine the formation topology and obtain the current attitude value of the spacecraft formation.
[0020] The spacecraft formation contains multiple spacecraft, and each spacecraft is a formation member. The relationship between the formation members in the formation can be determined through the topology of the spacecraft formation.
[0021] Step 102: Transform the spacecraft attitude control equation into a system tracking error equation.
[0022] Specifically, when transforming the spacecraft attitude control equation into the system tracking error equation, the...
Embodiment 2
[0057] A specific example is used to illustrate the finite-time cooperative control method of spacecraft formation attitude of the present invention under complex constraint conditions.
[0058] In the embodiment of the present invention, the formation attitude cooperative control method is proposed based on the sliding mode control and the design of the finite-time state observer, combined with the formation distributed cooperative control framework. In this method, the unknown angular velocity and coupling disturbance of the system are estimated in real time by designing an extended observer, and then the distributed control protocol is designed based on the finite-time sliding mode control theory.
[0059] The present invention's design and technical solutions are as follows:
[0060] Consider the following formation attitude control model consisting of n spacecraft:
[0061]
[0062] in, Represents the moment of inertia matrix of the i-th spacecraft; is the control...
Embodiment 3
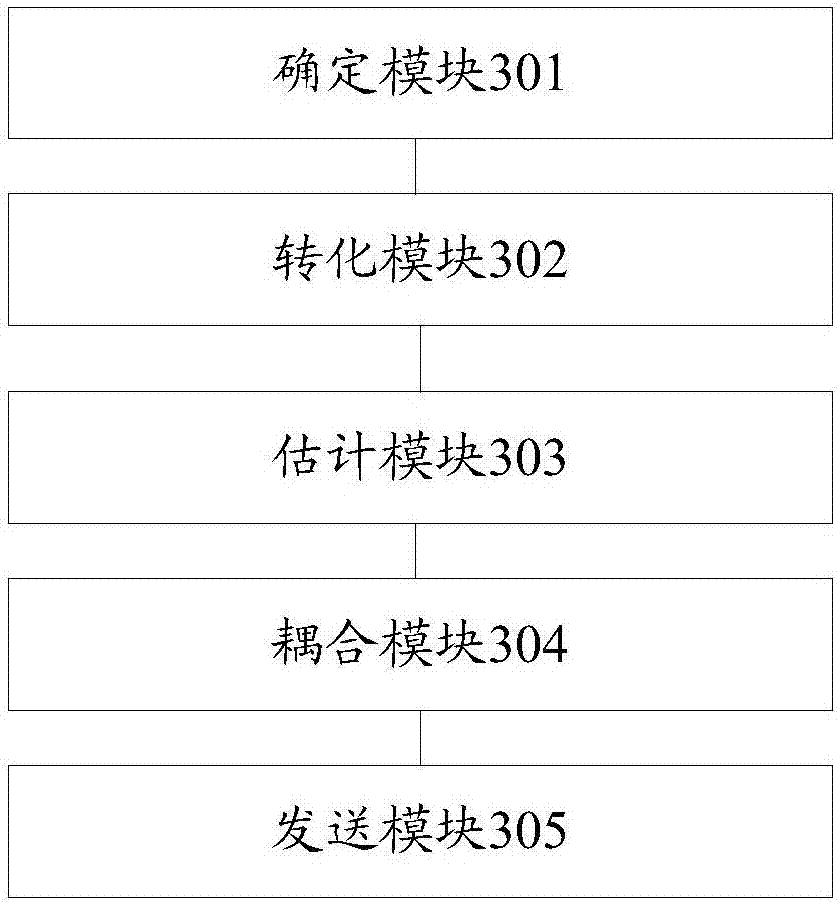
[0099] refer to image 3 , shows a schematic structural diagram of a space vehicle formation attitude finite-time cooperative control device under complex constraint conditions in Embodiment 3 of the present invention.
[0100]The spacecraft formation attitude finite-time cooperative control device under complex constraint conditions in the embodiment of the present invention includes: a determination module 301, which is used to determine the formation topology and obtain the current attitude value of the spacecraft formation; a conversion module 302, which is used to transform the spacecraft formation The attitude control equation is converted into the system tracking error equation; the estimation module 303 is used to call the system state observer to estimate the angular velocity and attitude value of each spacecraft formation member, and obtain the angular velocity estimation value and the attitude estimation value; the coupling module 304 is used for The estimated value...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com