Handheld mechanism of seven-freedom master operating mechanical hand
A main operation, manipulator technology, applied in the field of medical devices, can solve the problems of low efficiency, manual reset, low degree of freedom, etc., to achieve the effect of convenient and accurate measurement, high degree of automation, and wide application range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0023] The following are specific embodiments of the present invention and in conjunction with the accompanying drawings, the technical solutions of the present invention are further described, but the present invention is not limited to these embodiments.
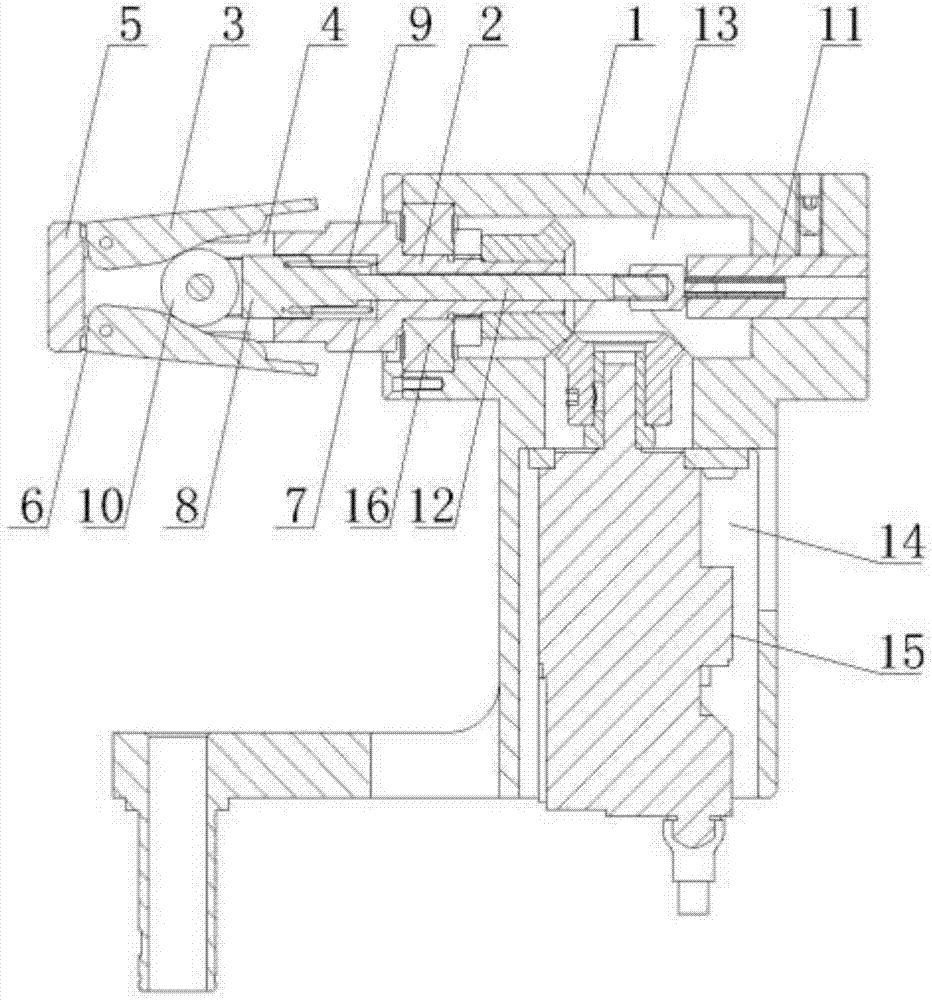
[0024] Such as figure 1 and figure 2 The hand-held mechanism of the seven-degree-of-freedom main manipulator shown includes a support 1 and a rotating shaft 2 that penetrates the support 1 and can rotate around its own central axis. The outer end of the rotating shaft 2 is hinged with two opposite grippers 3 , the outer end of the rotating shaft 2 has a slot 4 extending along its axial direction, and the two grippers 3 are symmetrically hinged in the slot 4, and the rotating shaft 2 is provided with a limit assembly for limiting the maximum angle of outward rotation of the two grippers 3 , A resetting structure for resetting the two grippers 3 is provided between the two grippers 3 when the grippers 3 rotate inwards.
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com