


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Robust and intuitive operating method via touch manipulator
A manipulator and operator technology, applied in instruments, simulators, electric controllers, etc., can solve problems such as manipulator drift, manipulator acceleration, inability to distinguish stuck situations, etc., to improve robustness, large-scale Tolerance, Effect of High Error Tolerance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
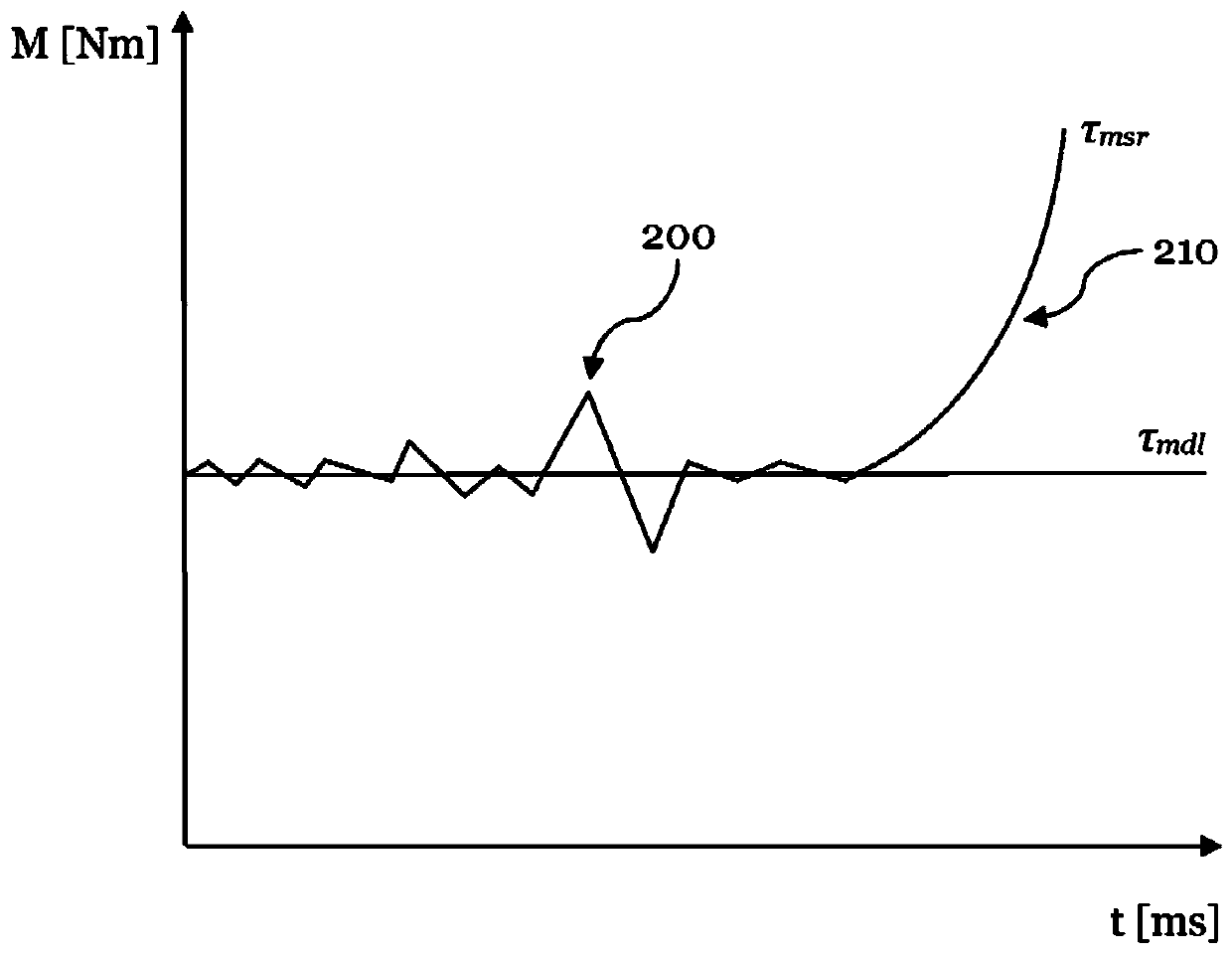
[0024] According to the invention, in the method described above, by taking into account the variation of the measured values instead of the model error (the difference between the modeled torque and the measured torque), a user request can be recognized particularly robustly, the following Let's explain about this.
[0025] user request identification
[0026] A simple realization of the user request "start" is based on the measured torque compared to the modeled torque of the internal dynamic model of the manipulator. Such a dynamic model is usually determined by determining the dynamic equations of the manipulator from the weights and geometric dimensions of the manipulator's components, for example by Lagrange-Formalismus or Newton-Euler algorithms. The dynamic model can simulate what torque is required to move the manipulator properly, or to keep the manipulator in a predetermined pose against the force of gravity.
[0027] According to the simple implementation des...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com