Robustness weighted least square positioning method in mixed environment based on arrival time
A weighted least squares, time of arrival technology, applied in the field of target positioning, can solve the problems of ignoring prior information, unable to effectively improve positioning performance, and inapplicability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0051] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
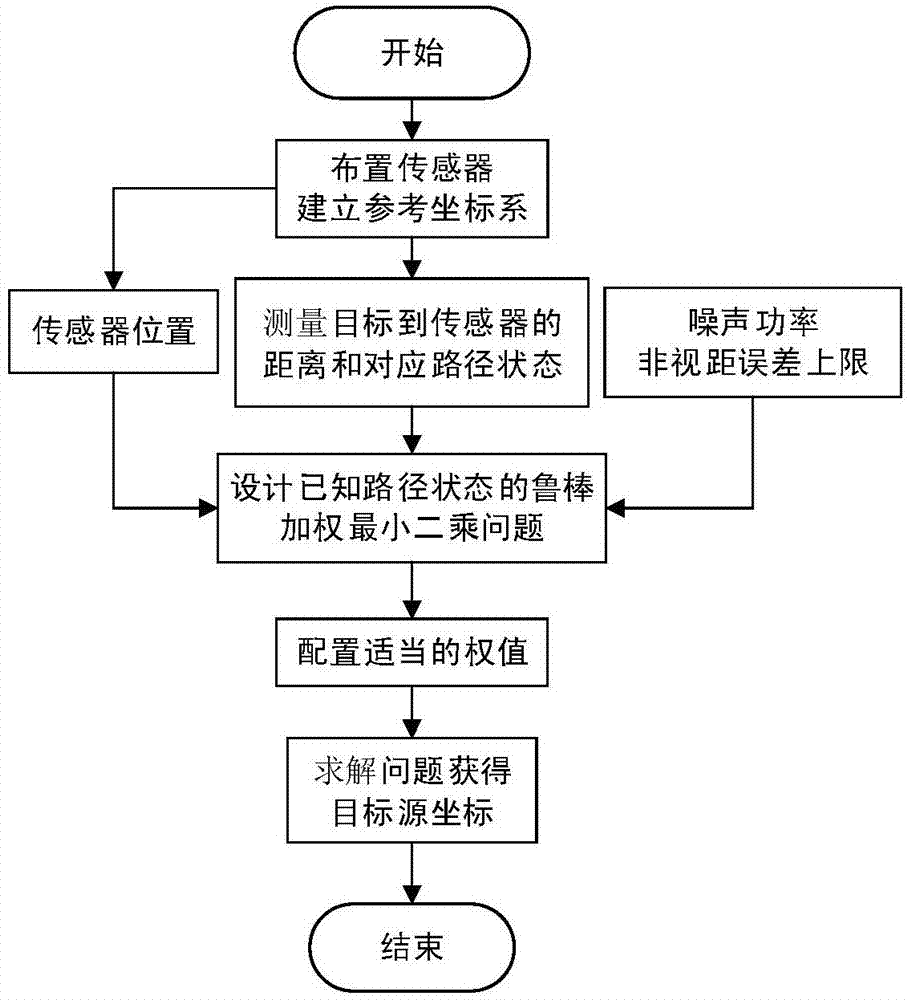
[0052] A time-of-arrival based robust weighted least squares positioning method proposed by the present invention in a mixed environment, its overall flow chart is as follows figure 2 As shown, it includes the following steps:
[0053] ① Construct a wireless sensor network, in which there is a target source for transmitting measurement signals and N sensors for receiving measurement signals; then in the wireless sensor network, establish a plane coordinate system or space coordinate system As a reference coordinate system; then the coordinate positions of the N sensors in the reference coordinate system are correspondingly recorded as s 1 ,...,s N, record the coordinate position of the target source in the reference coordinate system as x; wherein, N≥3, take N=7 in this embodiment, s 1 Indicates the coordinate position of the first sensor ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com