Self-adaptive double-layer sliding mode-based teleoperation system fast force estimation method
An operating system and self-adaptive technology, applied in the direction of self-adaptive control, general control system, control/regulation system, etc., can solve the problems of increasing equipment cost, easy measurement of position signal, difficult measurement of speed and external force signal, etc. To achieve a stable effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0080] The present invention will be further described below in conjunction with accompanying drawing:
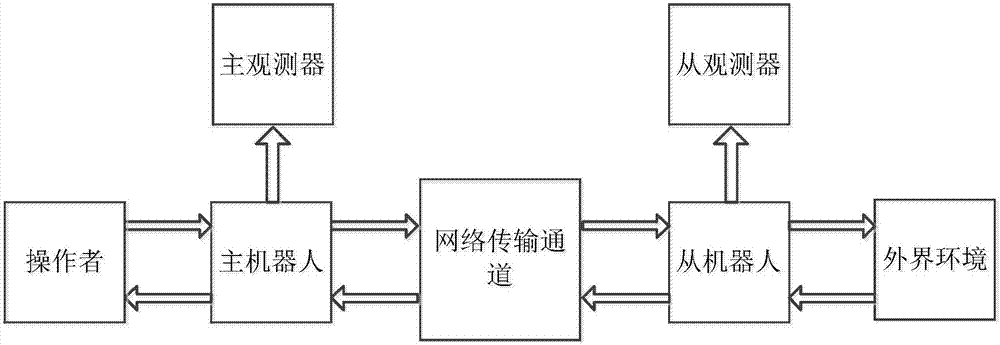
[0081] Such as figure 1 As shown, the teleoperation system is mainly composed of the operator, the master robot, the network transmission channel, the slave robot and the external environment. The operator operates the master robot locally, and its related motion information is transmitted to the slave robot through the network. The slave robot moves synchronously according to the motion information of the master robot, and feeds back the information obtained from the contact with the environment to the master robot. Use the observer to observe the master and slave robots, and obtain the external force information exerted by the operator and the external environment on the master and slave robots respectively.
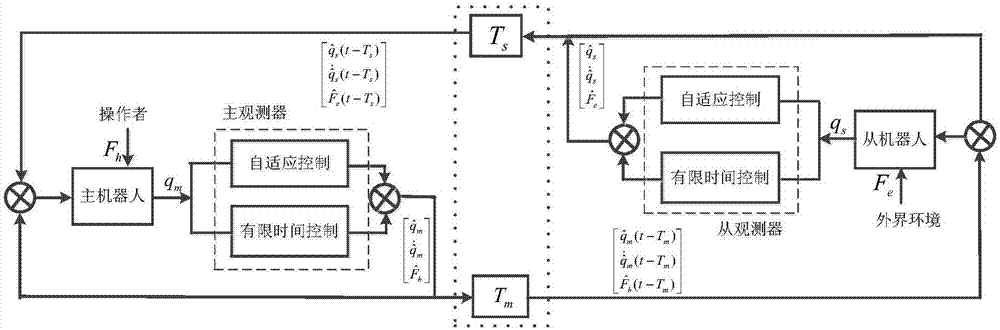
[0082] Such as figure 2 Shown, the inventive method comprises the following steps:
[0083] S1. Select a teleoperated robot system consisting of two 3-DOF robot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com