Binocular vision-based workpiece grabbing method
A binocular vision and binocular vision system technology, applied in the field of workpiece grasping based on binocular vision, can solve the problems of workpiece scaling, inconsistent brightness of rotation, lack of three-dimensional information of the workpiece, and poor versatility, etc. Good performance, fast speed and strong robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be further described below in conjunction with specific embodiment:
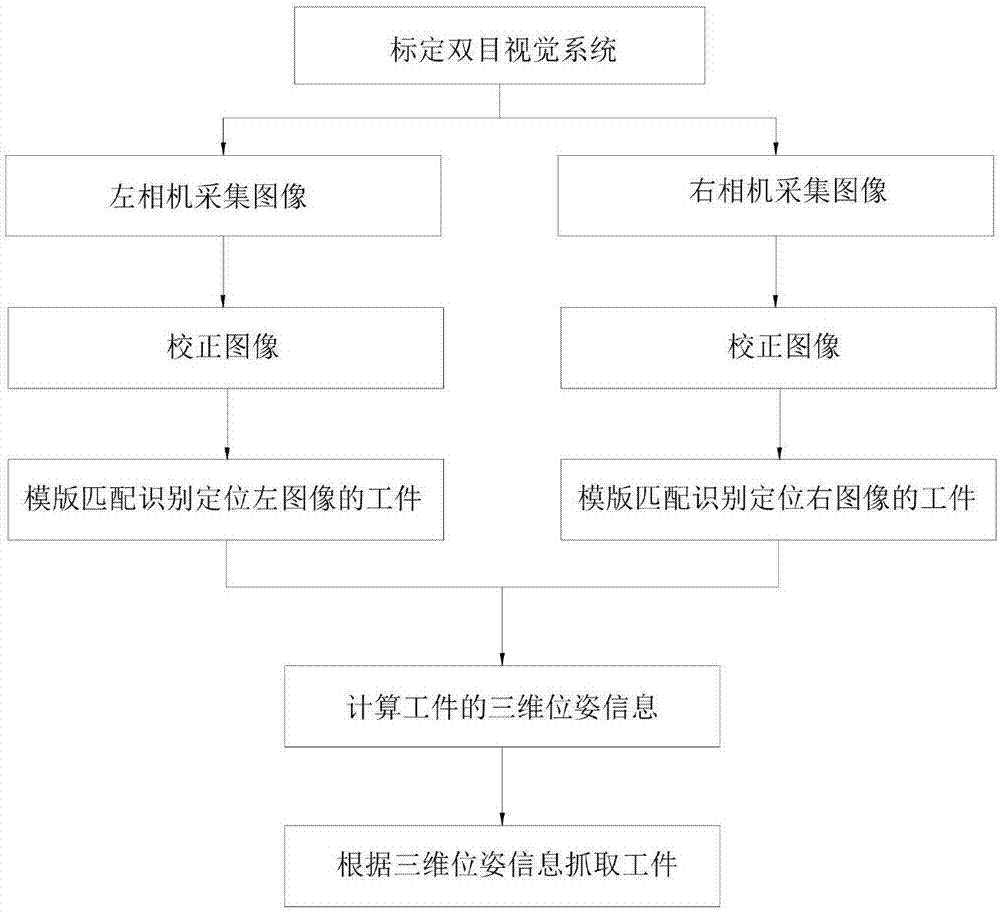
[0040] See attached figure 1 As shown, a binocular vision-based workpiece grasping method described in this embodiment includes the following steps:
[0041] (1) Calibrate the binocular vision system, the specific steps are as follows:
[0042] 1) Single-camera calibration: use the calibration board to perform single-camera calibration for each camera, and determine the camera distortion coefficient and camera internal reference matrix to correct the image and output an undistorted image;
[0043] 2) Camera correction: adjust the angle and distance between the left and right cameras to ensure that the output image lines are aligned;
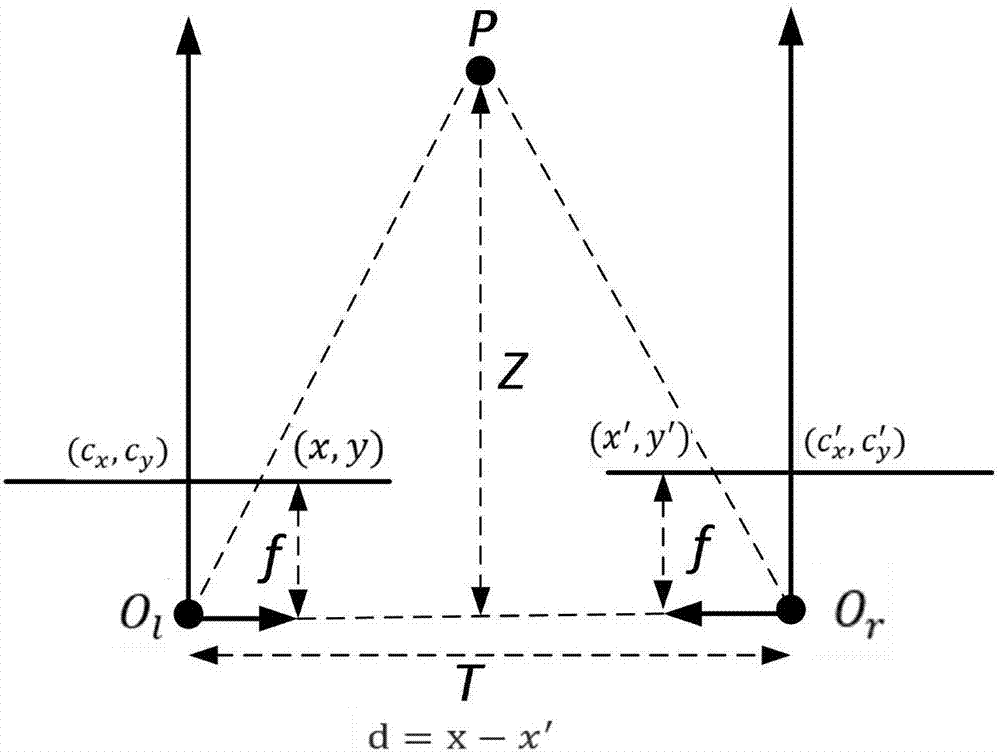
[0044] 3) Stereo calibration: Use the calibration board to calibrate to identify the focal length f of the camera, the center distance T of the left and right cameras, and the principal point where the left and right chief rays intersect the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com