Four-wheel driven stair climbing mobile robot
A mobile robot and stair-climbing technology, applied in the field of four-wheel-drive stair-climbing mobile robots, can solve the problems that the four-wheeled trolley cannot cross obstacles head-on and cannot be used.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
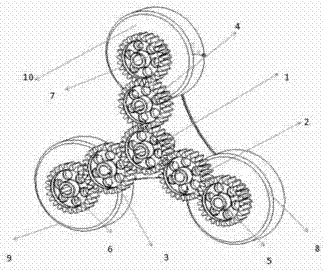
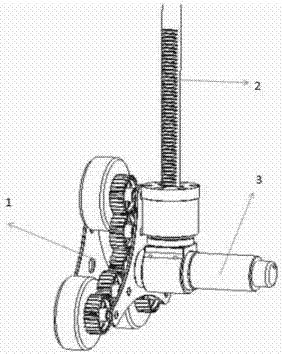
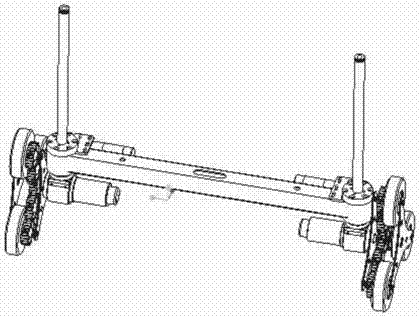
[0010] The trolley is steered by the motor, which can realize zero-radius steering in situ. The overall structure of the trolley consists of two parts, including the main frame driven by two wheel sets located in the middle of the trolley and the wheel set mechanism. The main frame consists of an axle and auxiliary support sections. The control part of the trolley is fixed on the supporting mechanism around the main axle, and rotates together with the main axle when moving. The wheel set structure is composed of two double-layer "Y"-shaped aluminum brackets, and three equal-length spokes form an angle of 120 degrees with each other, such as Figure 1 shown. The main shaft and the stepping motor used for overcoming obstacles are respectively located at the inner and outer sides of the intersection points fixed on the spokes. The transmission part of the wheel is located at the end of each spoke, and the turning of the wheel set and the cooperation of the stepping motor can re...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com