A Control System for Variable Cursor on TT&C Radar
A cursor and variable technology, applied in the field of control systems, can solve the problems of large relative position spacing in space, difficulty in installation and system debugging and execution, and achieve the effects of accurate fixation, reduced number, and convenient cursors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
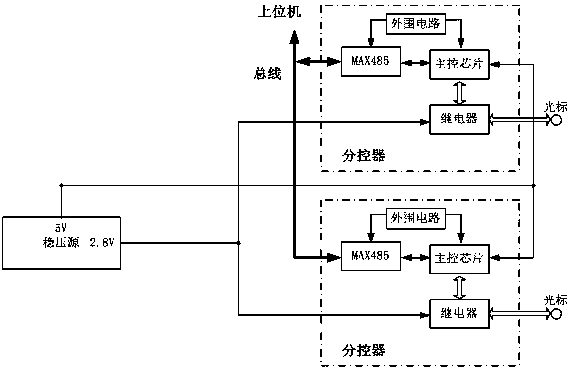
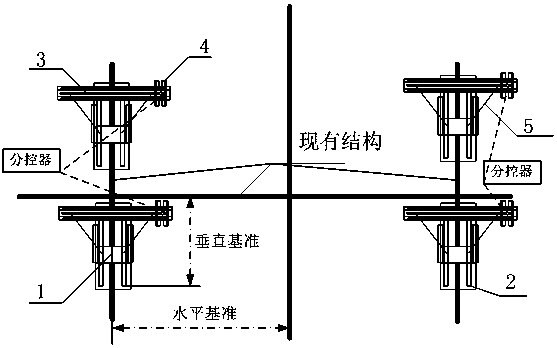
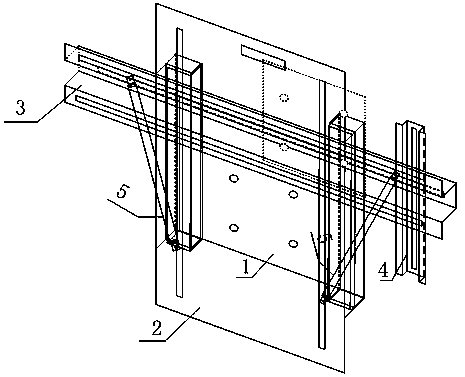
[0021] Such as figure 1 Shown in -8, the present invention relates to a kind of control system that is used for the variable cursor on the measurement and control radar, it comprises the control part that is used to control cursor and is used for the structural target frame of positioning cursor, wherein:
[0022] The control part includes a sub-controller and a voltage regulator. The sub-controller includes a main control chip, a MAX485 chip, a relay and a peripheral circuit. The sub-controller is controlled by a host computer, and the device addresses are defined as 2 and 3 respectively; The stabilized voltage source is used to provide power supply for the sub-controller and the cursor, including +5V and +2.8V; The radar’s control requirements for the cursor include single on / off, two on / off, and four on / off. The method of on / off one by one...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com