Visual servo based concentric-tube-robot precise motion control method
A technology of visual servoing and motion control, applied in program control, general control system, program control manipulator, etc., can solve problems such as precise positioning of difficult surgical target points
Inactive Publication Date: 2017-08-29
HARBIN INST OF TECH SHENZHEN GRADUATE SCHOOL
View PDF4 Cites 8 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
At present, the mainstream of the motion control of the concentric tube robot is the teleoperation algorithm, which is mainly based on the establishment of its kinematic model, which has high requirements for the accuracy of the kinematic model and the consideration of factors such as friction and torsion. It is difficult to accurately locate the surgical target point, and it can only be roughly reached
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples



Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
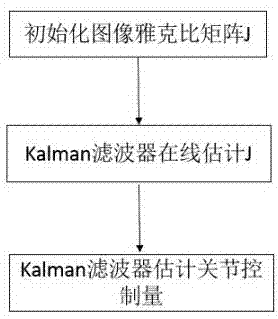
The invention discloses a visual servo based concentric-tube-robot precise motion control method. The method includes: establishing an eye-in-hand visual servo system on the basis of images with an aim to extract features of the images without calibration of a camera and completing extraction of controlled quantity through mapping of image Jacobian matrix; completing online estimation of the image Jacobian matrix by the aid of a Kalman filter, taking feature variation of the images as the measurement vector and taking the image Jacobian matrix as the state vector; taking the estimated value of the image Jacobian matrix as the measurement matrix of the Kalman filter, taking the joint angle error as the state vector, and taking the image error as the measurement vector, and acquiring the controlled quantity of the joint angle through filter estimation; when the image error approaches zero, completing position of target points. Motion control is fed back by relying on reliable image information, and the tiny and vibrating target points during surgical operation are finally accurately positioned, so that surgical operation is completed.
Description
A precise motion control method for concentric tube robot based on visual servoing technical field The invention relates to a precise motion control method for a concentric tube medical robot, in particular to a precise motion control method for a concentric tube robot based on visual servoing. Background technique At present, the mainstream of the motion control of the concentric tube robot is the teleoperation algorithm, which is mainly based on the establishment of its kinematic model, which has high requirements for the accuracy of the kinematic model and the consideration of factors such as friction and torsion. It is difficult to accurately locate the surgical target point, and it can only be roughly reached. In recent years, related technologies such as X-ray, ultrasound, MRI, and stereoscopic imaging have been applied to feedback the moving shape of concentric tubes, but the image-based visual servoing method does not require much modification of the hardware and c...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More IPC IPC(8): B25J9/16
CPCB25J9/1697G05B2219/40005
Inventor 宋霜卢意张长春孟庆虎
Owner HARBIN INST OF TECH SHENZHEN GRADUATE SCHOOL
Features
- R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
Why Patsnap Eureka
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Social media
Patsnap Eureka Blog
Learn More Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com