Beidou-based navigation system, working method and vehicle installed with the navigation system
A technology of vehicles and lanes, applied in the field of navigation, can solve problems such as a dilemma and the inability of vehicles to turn smoothly, and achieve the effects of avoiding tail flicking, avoiding line pressure, and correcting the turning radius
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
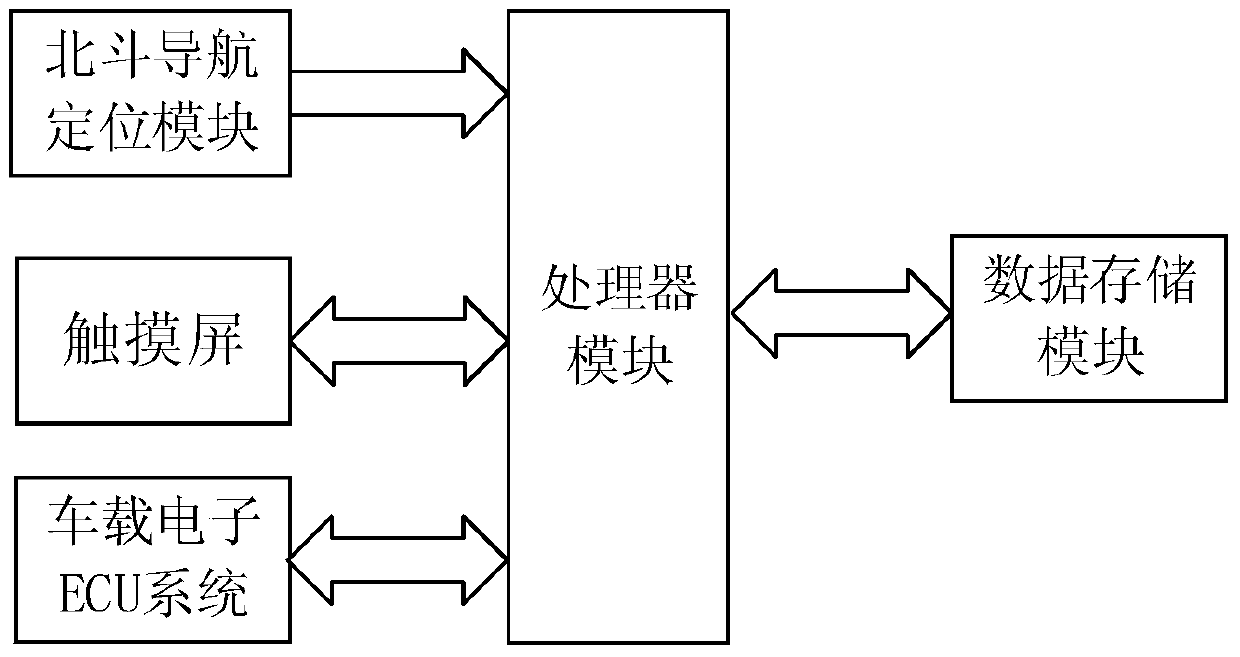
[0026] Such as figure 1 As shown, embodiment 1 provides a kind of navigation system, comprises: processor module, the Beidou navigation positioning module that is connected with this processor module, data storage module; Described data storage module is stored with map data, vehicle type turning radius data; The processor module is adapted to plan a navigation route according to the current location of the vehicle and the input target location, as well as the turning radius data of the current vehicle.
[0027] The processor module, for example, adopts an embedded chip, and the processor module is also connected with a touch screen, so as to perform corresponding input operation and display.
[0028] Specifically, the vehicle type turning radius data includes but not limited to the length, width, wheelbase, vehicle turning radius and other data of various types of vehicles; Find the turning radius data that matches the vehicle type, and use the turning radius data as an impo...
Embodiment 2
[0042] On the basis of embodiment 1, present embodiment 2 provides a kind of working method of navigation system, and described navigation system comprises: processor module, the Beidou navigation positioning module that links to each other with this processor module, data storage module; The storage module stores map data and vehicle type turning radius data; the working method includes: the processor module is adapted to plan a navigation route according to the current location of the vehicle and the input target location, and combined with the turning radius data of the current vehicle. .
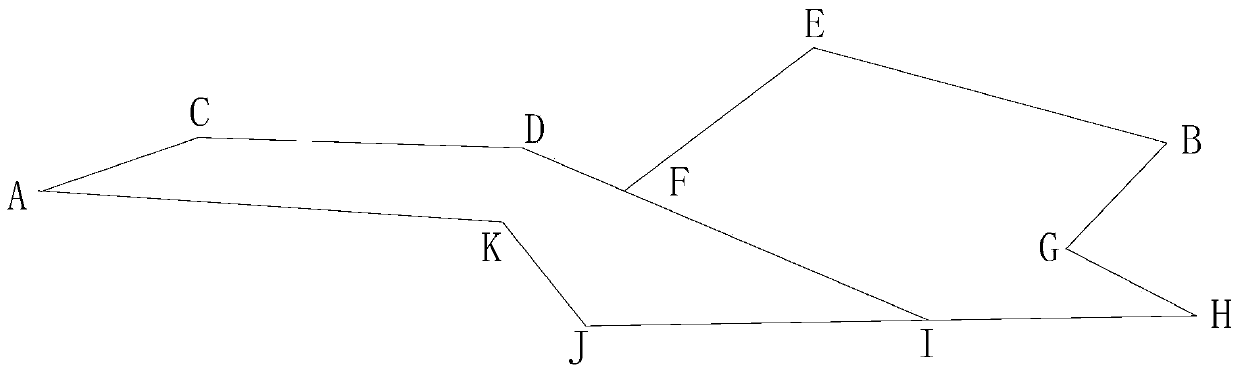
[0043] The processor module is adapted to pre-calculate several preliminary planning navigation paths between the vehicle's current location and the input target location; and search for corresponding curved road sections in each preliminary planning navigation path, and turn The radius data filters each curved road section, that is, obtains the planned navigation path corresponding to t...
Embodiment 3
[0050] Such as Figure 3a , Figure 3b with Figure 3c As shown, on Embodiment 1, Embodiment 3 provides a vehicle.
[0051] The front of the vehicle is provided with multiple rows of front wheels, and each row of front wheels corresponds to an independent steering device and a driving device, and each steering device and driving device are connected to a vehicle-mounted electronic ECU system, and the vehicle-mounted electronic ECU system is connected to the vehicle-mounted electronic ECU system. connected to the navigation system.
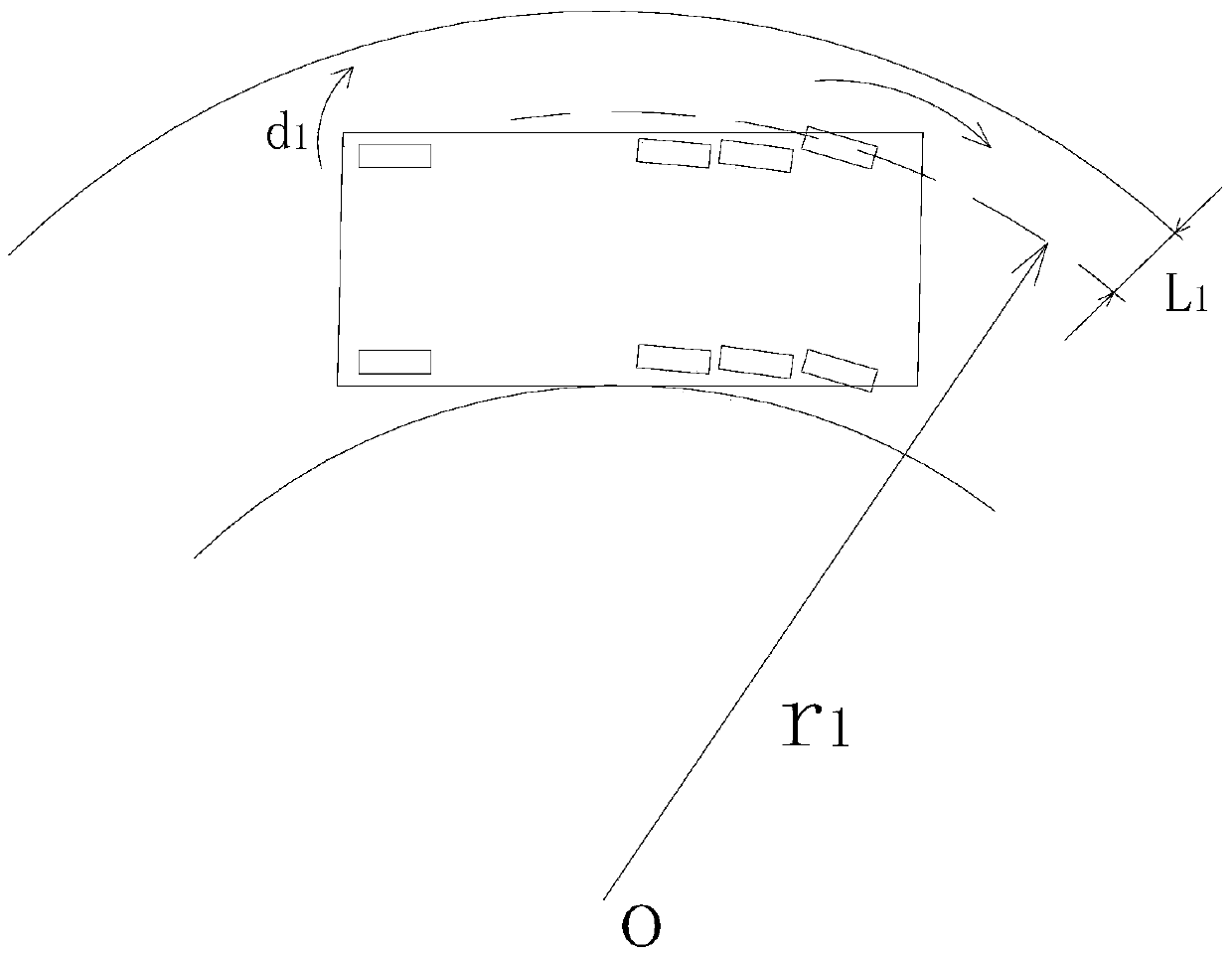
[0052] The vehicle-mounted electronic ECU system is connected with the vehicle-mounted panoramic camera device, and photographs the turning posture of the vehicle, specifically detects whether the vehicle is in the current lane, and feeds back the detection result to the vehicle-mounted electronic ECU system.
[0053] When the vehicle enters a curve, it first uses the first row of front wheels as the main steering wheel to make a turning action,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com