Global optimum particle filtering method and global optimum particle filter
A global optimal particle and particle technology, applied in the field of signal processing, can solve the problems of particle diversity and insufficient guiding ability of the optimization process, inability to effectively handle nonlinear and non-Gaussian signals, and increase the complexity of particle filtering and the amount of calculation. , to avoid particle degradation, ensure real-time and rapidity, and improve particle utilization.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach 1
[0036] The global optimal particle filter method provided by the present invention uses particles to describe the state space of the dynamic system, and the state space model of the nonlinear dynamic system is:
[0037] x k = f k-1 (x k-1 , u k-1 )
[0038] z k = h k (x k , v k )
[0039] where x k ∈R n is the n-dimensional system state vector at time k, z k ∈R m is the m-dimensional measurement vector at time k; the system state transition map and measurement map are f k-1 (×): R n × R n →R n and h k ( ): R m × R m →R m ; The process noise and measurement noise of the system are respectively u k-1 ∈ R n and v k ∈ R m .
[0040] It should be noted that the expression form of the state space model of the nonlinear system is equivalent to the above formula, that is, those skilled in the art can think that the formula expression of the nonlinear system is as shown in the above formula.
[0041] First, the insensitive Kalman filter algorithm is used to gener...
specific Embodiment approach 2
[0050] Specific implementation mode two: the difference between this implementation mode and specific implementation mode one is:
[0051] The initial particle set in step 1 is It is characterized in that the step 2 is specifically:
[0052] Step 2.1: Calculate the initial particle set mean of and variance Get UKF's suggested distribution Particles of which Satisfy
[0053] Step 2.2: Calculate the sampled particles weight of And normalize to get the normalized weight which is
[0054]
[0055] Step 2.3: According to the particles and its weight Import to Sampled Particles
[0056] Other steps and parameters are the same as those in Embodiment 1.
specific Embodiment approach 3
[0057] Specific embodiment three: the difference between this embodiment and specific embodiment one or two is:
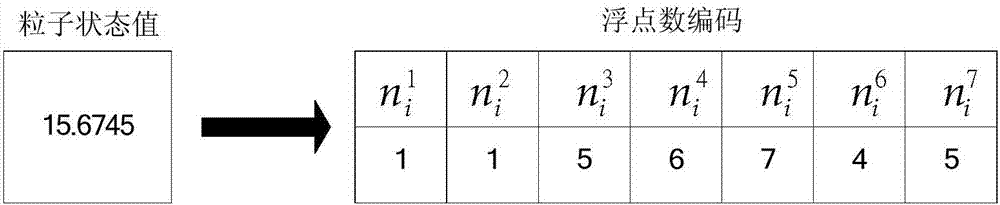
[0058] Step 3 is specifically: use the floating-point number format with a fixed effective number l to convert the particle Expressed as The encoded particle set is obtained as in Indicates the value of the lth significant digit of the Nth particle.
[0059] the first digit of the floating point value Represents the sign bit, "1" represents a positive number, and "0" represents a negative number. The fixed effective number of digits l is set through the pre-filtering range. It should be noted here that the precision in Matlab is 4 digits after the decimal point, and if the number of digits is less than l, the highest digit is filled with 0. For example, the state value of the i-th particle at time k is 15.6745, and l=7, then its floating-point number format is as follows figure 2 shown.
[0060] Other steps and parameters are the same as those in Embod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com