Humanoid mechanical finger structure based on shaft drive transmission
A mechanical finger and shaft transmission technology, applied in the field of robots, can solve the problems of slow response, inaccurate control, small output torque, etc., and achieve the effects of increasing service life, convenient and precise control, and ensuring line safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The technical solutions of the present invention will be described in detail below, but the protection scope of the present invention is not limited to the embodiments.
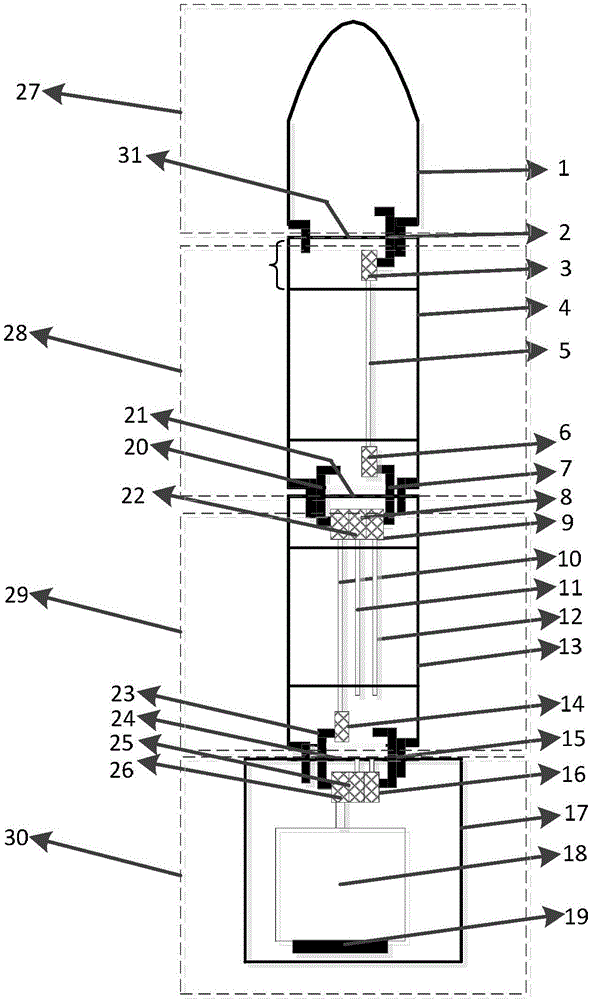
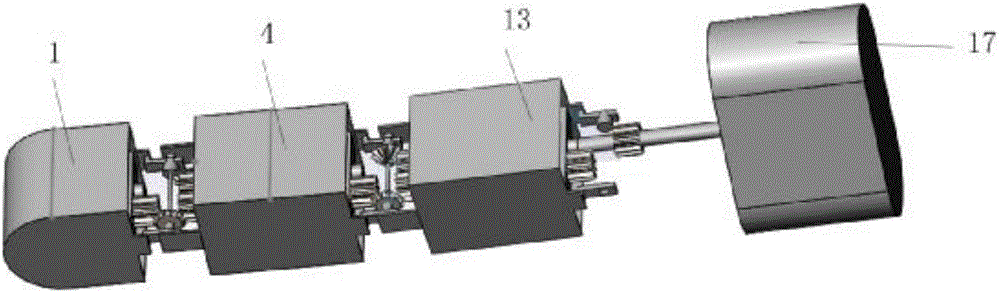
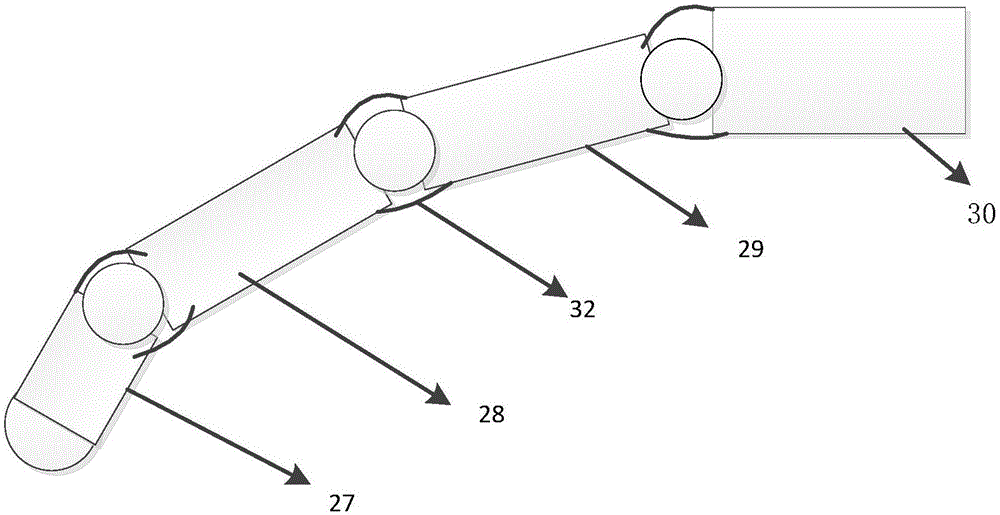
[0021] Such as figure 1 and figure 2 As shown, a humanoid mechanical finger structure based on shaft transmission of the present invention includes a first phalanx 27, a second phalanx 28, a third phalanx 29 and a base 30 sequentially connected from top to bottom; The bottom of the housing 1 of the first phalanx 27 is connected with the first crown gear 2, the first crown gear 2 meshes with the first spur gear 3 in the second phalanx 28, and the first spur gear 3 is connected downward to the first transmission shaft 5 , the bottom of the first transmission shaft 5 is provided with a second spur gear 6, the second spur gear 6 is connected to the fifth spur gear 9 through the third crown gear 7, and the fifth spur gear 9 meshes with the fourth spur gear 8 and the The 3rd spur gear 22, one end of the 3...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com