A deep well automatic detection and rescue robot and rescue method
A rescue robot and robot technology, applied in the field of deep well rescue, can solve the problems of reduced lifting speed, heavy weight, large volume, and difficulty in adapting to rescuers, and achieve the effects of reduced power and volume, strong environmental adaptability, and increased ascent speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
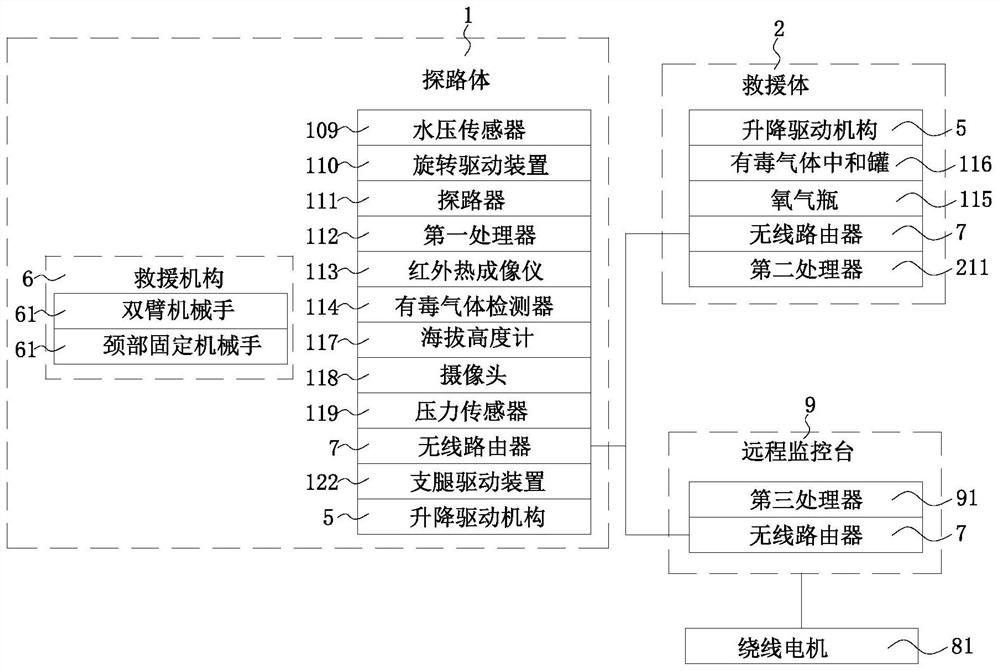
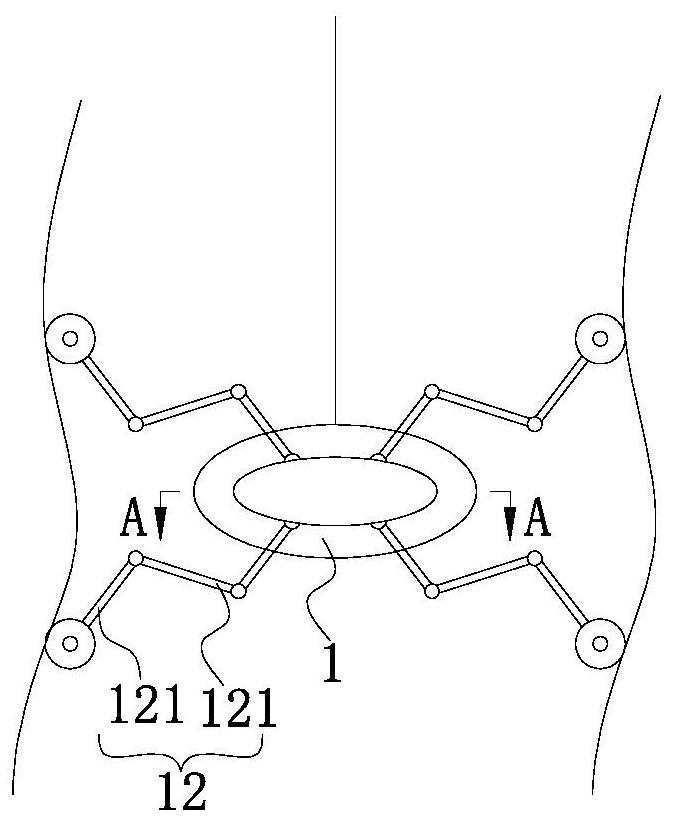
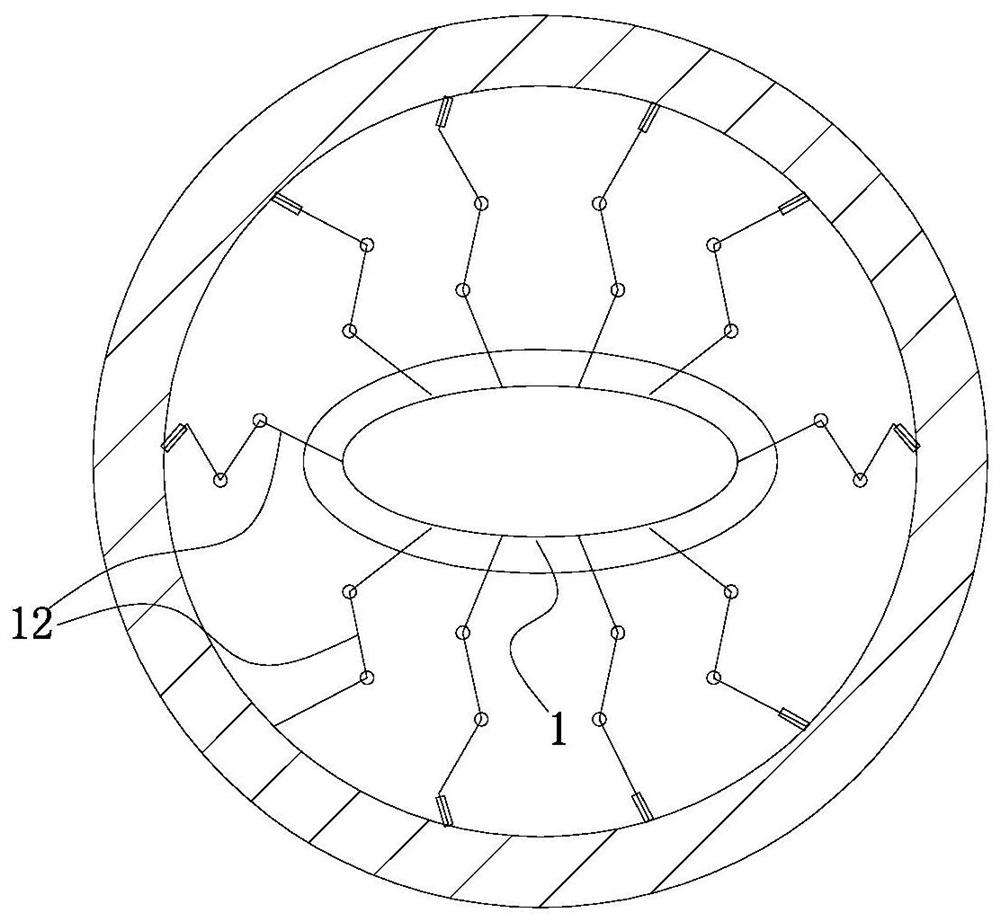
[0049] Such as Figure 1-Figure 6 A deep well automatic detection and rescue robot shown includes a horizontally arranged elliptical spherical shell-shaped pathfinding body 1, and a rescue rope 3 passes through a through hole coaxially arranged on the pathfinding body 1 along its vertical axis, Between the path-finding body 1 and the rescue rope 3, an elevator-type lifting drive mechanism 5 that can make the path-finding body 1 go up and down along the rescue rope 3, and a rotating drive device 110 that can make the path-finding body 1 rotate relative to the rescue rope 3 are respectively arranged; The elevator-type lifting drive mechanism 5 includes a lifting motor installed in the casing of the path detection body 1, the output end of the lifting motor is connected with the clutch, the reducer, and the pulley in turn, and the pulley is closely attached to the rescue rope 3 and can slide along the rescue rope 3 , a braking device is also set on the pulley;
[0050] The said ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com