Multi-point control-based unmanned aerial vehicle system and control method
A technology of multi-point control and control method, applied in the direction of control/adjustment system, non-electric variable control, three-dimensional position/channel control, etc., can solve the problems of unrevealed and solved safety and accurate control of multiple control terminals, so as to ensure safety performance, stability, and security
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
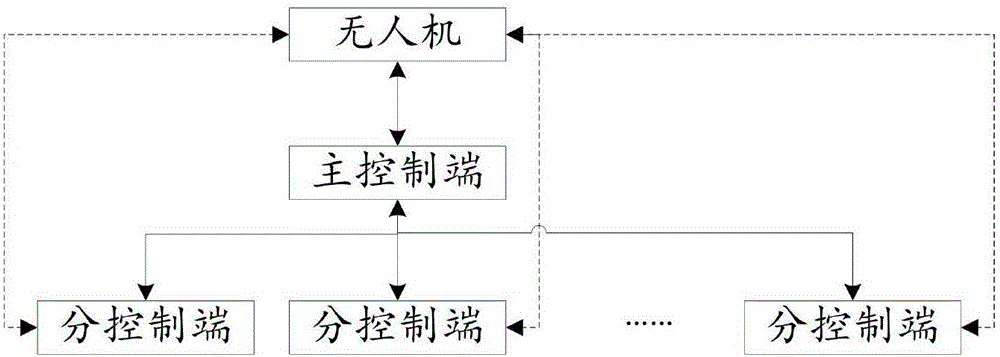
[0041] A UAV system based on multi-point control, such as figure 1 As shown, it includes a plurality of control terminals and drones, and the drone is controlled by the control terminal holding the control right;
[0042] The multiple control terminals include a main control terminal and sub-control terminals, and the main control terminal has the right to allocate the control right;
[0043] The main control terminal and the sub-control terminal respectively have a location acquisition module for acquiring location information;
[0044] The main control terminal and the sub-control terminal respectively have a wireless communication module; the main control terminal can assign the authority of the control right to the sub-control terminal through the wireless communication module; the sub-control terminal can Send its location information to the main control terminal through the wireless communication module.
[0045] Further, the sub-control end can also send location info...
Embodiment 2
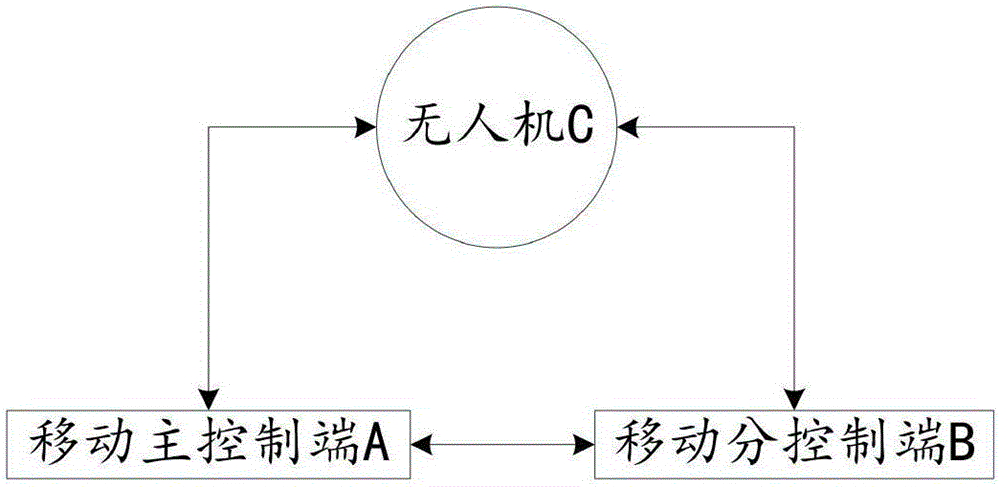
[0056] A method of UAV control based on multi-point control, such as figure 2 As shown, a UAV system based on two-point control is used, and the UAV system includes a mobile main control terminal A, a mobile sub-control terminal B and a UAV C. The drone C communicates with both mobile control terminals, and the mobile main control terminal A and the mobile sub-control terminal B can also communicate.
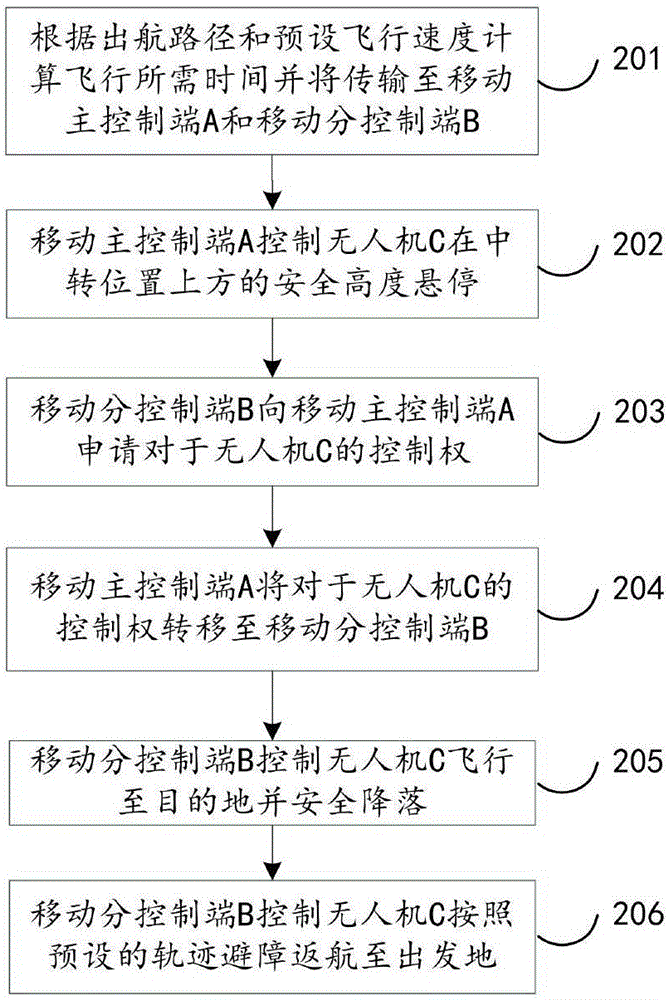
[0057] In this embodiment, the delivery of goods is realized by UAV C. The mobile main control terminal A is located at the starting point, and the mobile sub-control terminal B is located at the destination. And the mutual communication can be carried out during the arrival process. Load cargo to UAV C at the starting point, unload the cargo after arriving at the destination, and then control UAV C to return. For the control method of UAV C, such as image 3 shown, including:
[0058] S201. UAV C calculates the required flight time according to the flight path and preset f...
Embodiment 3
[0068] A method for controlling an unmanned aerial vehicle based on multi-point control uses an unmanned aerial vehicle system based on two-point control, and the unmanned aerial vehicle system includes a mobile main control terminal A, a mobile sub-control terminal B and an unmanned aerial vehicle C. The drone C communicates with both mobile control terminals, and the mobile main control terminal A and the mobile sub-control terminal B can also communicate.
[0069] In this embodiment, the delivery of goods is realized by UAV C. The mobile main control terminal A is located at the starting point, and the mobile sub-control terminal B is located at the destination. And the mutual communication can be carried out during the arrival process. Load cargo to UAV C at the starting point, unload the cargo after arriving at the destination, and then control UAV C to return. For the control method of UAV C, such as image 3 shown, including:
[0070] S301. UAV C calculates the requi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com