Wheel-leg hybrid amphibious robot with ground movement and flight motion modes
A movement method and robot technology, applied in the field of robotics, can solve the problems of few search and rescue robots, rare robots, and easy winding of transmission lines, so as to increase mobility and work efficiency, facilitate search and rescue work, and improve flexibility.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
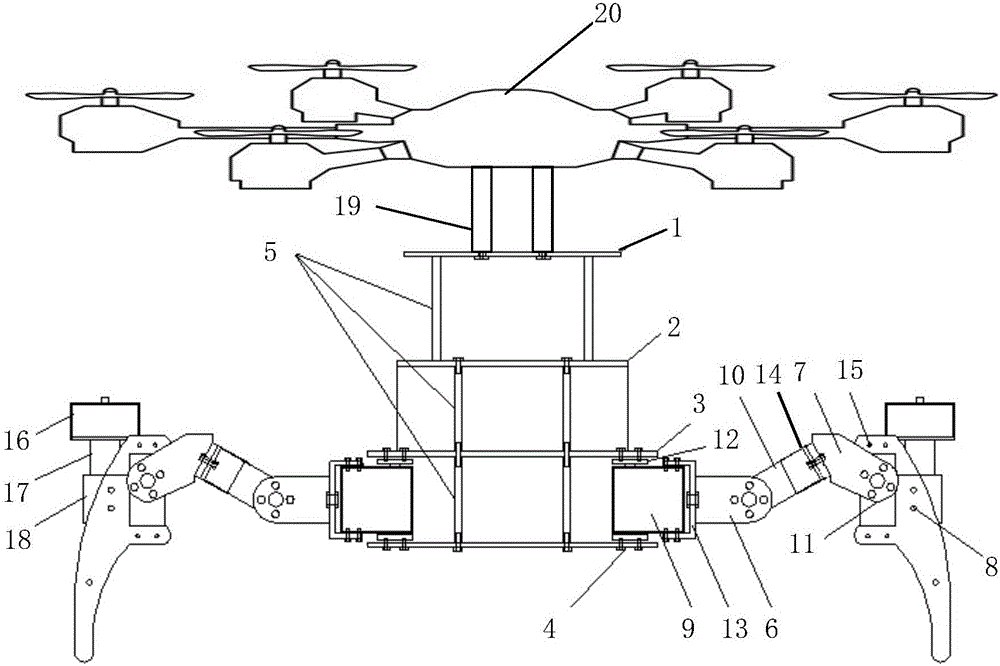
[0025] Embodiment 1: Referring to the accompanying drawings, the wheel-leg compound amphibious robot with ground movement and flight movement modes of the present invention mainly includes: a main body bracket, four gear train devices, six three-joint bionic limb devices and a hexaplane flying device ;
[0026] The main body support includes an upper support plate 1, an upper middle support plate 2, a lower middle support plate 3, and a lower support plate 4, and the four support plates are fastened and connected by copper columns 5; the four support plates adopted are from Considering the force analysis and the position of the center of gravity, the upper two layers of boards are small and thin, and the lower two layers of boards are large and thick; among them, the middle and lower support plates 3 and the lower support plates 4 have the same shape and size; the upper support plate 1, The upper and middle support plates 2 have the same shape and size.
[0027] The six three...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com