Mars final approaching section autonomous navigation method based on relative measurement information
An autonomous navigation and relative measurement technology, applied in the field of deep space exploration, can solve problems such as planetary ephemeris errors and influence of navigation results, and achieve the effects of reducing state divergence, reducing adverse effects, and improving navigation performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
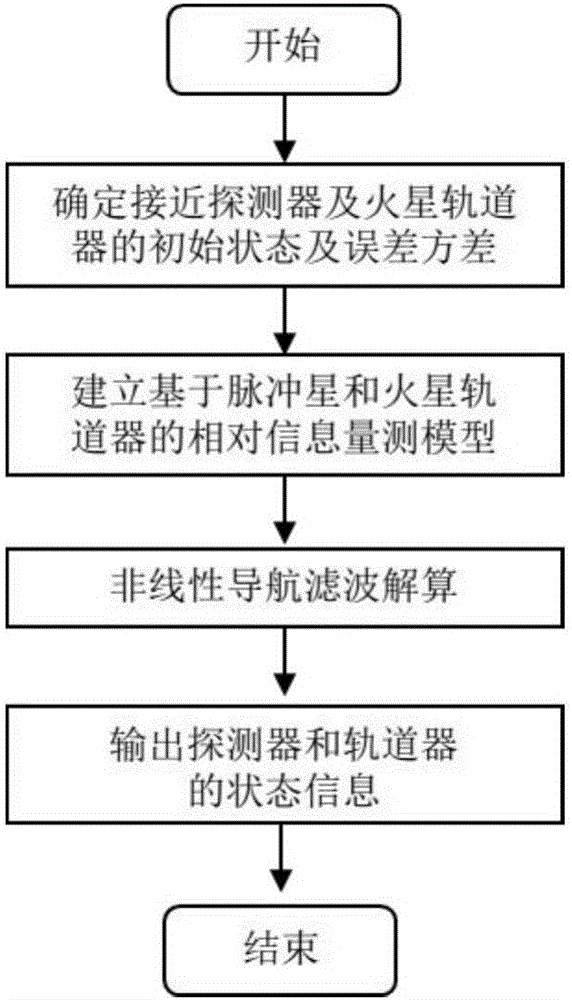
[0057] A method for autonomous navigation of the Mars final approach segment based on relative measurement information disclosed in this example includes the following steps:
[0058] Step 1: Establish a dynamic model of Mars' final approach and orbit.
[0059] The dynamic model of the navigation system for the final Mars approach segment and orbit segment is established in the J2000 Mars center inertial coordinate system. The twelve-dimensional state vector includes the position and velocity vector of the Mars approaching probe represented by the subscript s and the position and velocity vector of the Mars orbiter represented by the subscript o, denoted as
[0060]
[0061] where r s =[r x,s r y,s r z,s ] T ,v s =[v x,s v y,s v z,s ] T ;
[0062] where r o =[r x,o r y,o r z,o ] T ,v o =[v x,o v y,o v z,o ] T .
[0063] Using J 2 The two-body dynamics equation under the disturbance is used as the system dynamics model for state recursion, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com