A Point Cloud Simplified Filtering Method
A point cloud and three-dimensional technology, applied in the field of image processing, can solve the problems of low computing power of embedded processors, difficulty in meeting engineering application requirements, and long time-consuming operation of existing methods, achieving point cloud simplification and fineness, fast computing speed, The effect of meeting processing time requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
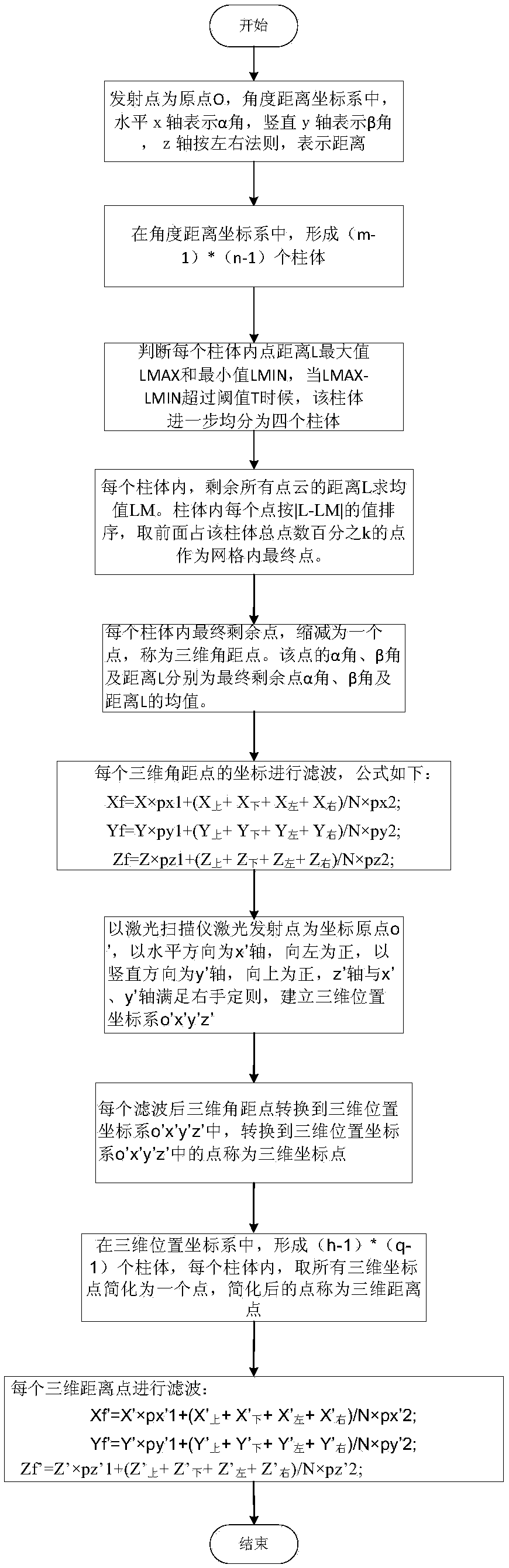
[0059] (1) Taking the laser emission point of the laser scanner as the coordinate origin o, taking the horizontal direction as the x-axis, the vertical direction as the y-axis, the z-axis and the x, y-axis satisfy the right-hand rule, and establish an angular distance coordinate system oxyz; wherein, The x-axis coordinate represents the left and right horizontal swing angle α of the laser scanner, which is defined as positive to the left; the y-axis coordinate represents the vertical swing angle β of the laser scanner up and down, and is defined as positive upward; the z-axis coordinate represents the laser emission point of the laser scanner to the target The distance value L;
[0060] (2) In the angular distance coordinate system oxyz, the point cloud starts from the minimum angle -4 degrees corresponding to the α angle and ends at the maximum angle +4 degrees. On the x-axis, 41 points perpendicular to the x-axis are divided at intervals of 0.2 degrees. The plane; with the m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com