Model-free control method in intelligent control
A control method and intelligent control technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the requirements of high computing power of the main controller, many controller parameters, anti-interference and uncertain processing capabilities, etc. problem, to achieve the effect of reducing the calculation burden and cost, and the controller structure and algorithm are simple
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be further described below in conjunction with accompanying drawing.
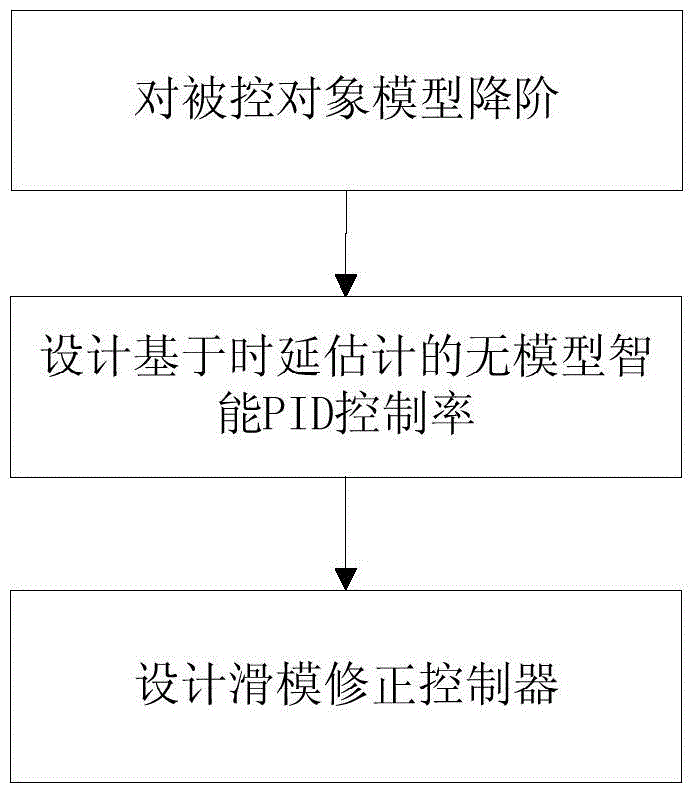
[0039] A model-free control method in intelligent control of the present invention comprises the following steps:
[0040] Step 1. Reduce the order of the controlled object model, specifically:
[0041] Assuming that the n-order plant model can be described as the following form:
[0042]
[0043] Where y is the output of the controlled object, Indicates the linear or nonlinear part of the system model, u is the input of the controlled object system, m and n are the order of input and output respectively, and b is the actual input parameter of the control quantity;
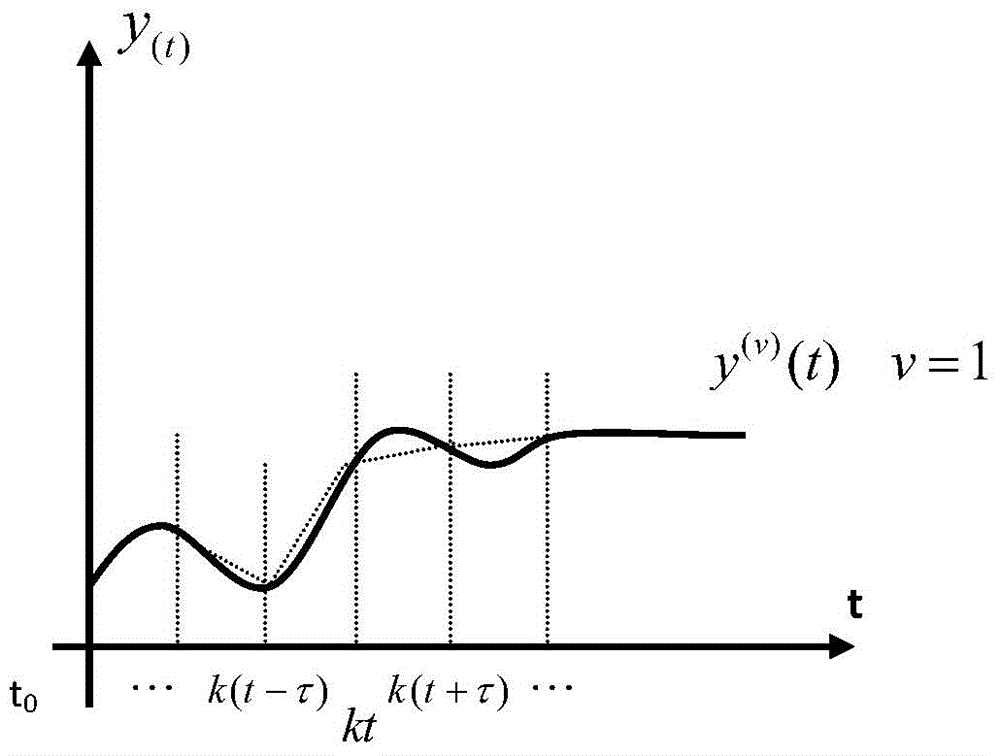
[0044] according to image 3 The order reduction principle shown in this paper uses a lower-order model to approximately replace the original high-order model within a short period of time (usually one sampling period of the embedded computer system), image 3 In the middle, the first-order linear model...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com