Control method for avoiding collision during emergent lane changing of vehicle in high-speed state
A control method and vehicle technology, applied in the direction of control devices, vehicle components, external condition input parameters, etc., can solve the problems of not considering the self-vehicle and the vehicle in front, less detection content, and inability to guarantee vehicle collision avoidance, etc., so as to reduce injuries risk, mitigation of accident consequences, effects of avoiding accidents
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
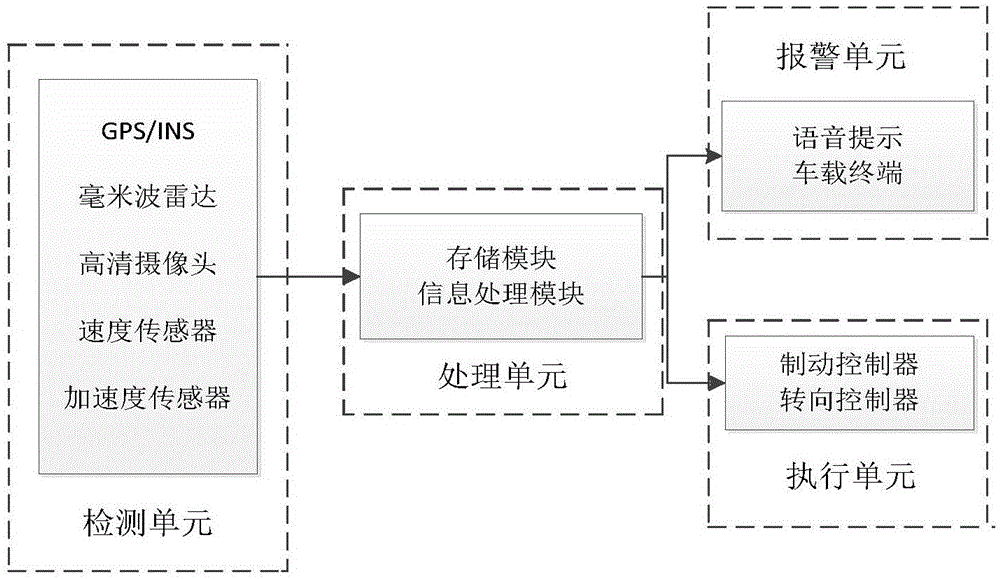
[0026] Such as figure 1 As shown, a control system for emergency vehicle lane change and collision avoidance at high speed, including a detection unit, a processing unit, an alarm unit and an execution unit;
[0027] The detection unit, processing unit, alarm unit and execution unit are connected in sequence;
[0028] The detection unit is composed of GPS / INS, millimeter-wave radar, high-definition camera, speed sensor and acceleration sensor. The millimeter-wave radar is installed at the front and rear ends of the vehicle, the high-definition camera is installed under the headlights on the front side of the vehicle, and the speed sensor is installed at the front of the vehicle. On the output shaft of the transmission, the acceleration sensor is installed in the body stabilization system ESP; GPS / INS and millimeter-wave radar are use...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com