Octopus-tentacle-simulated curved and torsional flexible joint
A flexible joint and bending technology, applied in manipulators, manufacturing tools, joints, etc., can solve the problems of heavy mass, high rigidity, and large volume of soft robots, and achieve low energy consumption, convenient control, and reduced risk of damage.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with accompanying drawing:
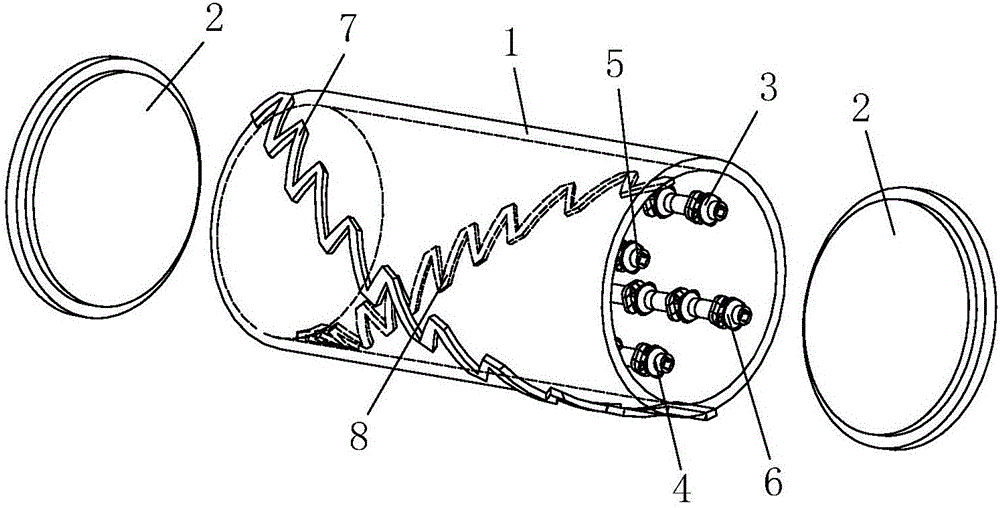
[0028] Such as figure 1 A flexible joint that imitates the bending and twisting of octopus tentacles is shown, including a flexible hollow tube 1, a support end surface 2 that seals both ends of the hollow tube 1, a first actuating structure that is arranged on the hollow tube 1 for imitating longitudinal muscles, and The second actuating structure used to imitate oblique muscles, the supporting end surface 2 is arranged at both ends of the hollow pipe 1, which plays the role of sealing the hollow pipe 1 and protecting the structures inside the hollow pipe 1; When the second actuation structure is in the energized and heated state, the contraction bending deformation is generated to drive the hollow pipe 1 to realize the bending movement, and the second actuation structure is in the energized heating state to produce the contraction bending deformation to drive one end of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com