Dish-shaped underwater gliding robot
A gliding robot and robot technology, applied in underwater operation equipment, transportation and packaging, ships, etc., can solve problems such as poor hydrodynamic performance, high energy consumption, poor endurance, etc., to save energy, reduce dissipation rate, The effect of meeting the design requirements and actual needs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0024] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
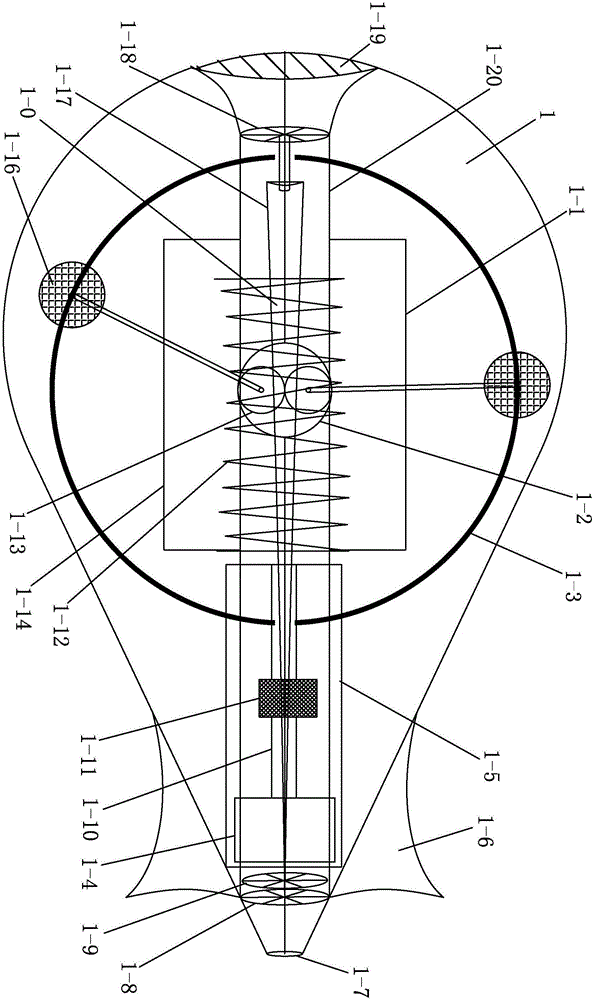
[0025] combine figure 1 Note that the dish-shaped underwater gliding robot includes a main shell, which is drop-shaped in shape, and the main shell is mainly composed of a sealed upper half cabin 2 and a lower half cabin 1; the longitudinal section of the main shell adopts NACA airfoil;
[0026] The heave adjustment mechanism 2-0 for controlling the heave of the robot is arranged in the upper half cabin 2; the electromagnetic propulsion system 1-0 for controlling the navigation of the robot is arranged in the lower half cabin 1, and provides a power source for the electromagnetic propulsion system 1-0. The communication module 1-14, the attitude adjustment mechanism 1-2 for controlling the position of the robot, and the center of gravity adjustment mechanism 1-5 for controlling the tail tilt of the slider;
[0027] T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com