Method and device for realizing virtual reality by using unmanned aerial vehicle based on computer vision
A technology of unmanned aerial vehicles and computer vision, which is applied to the input/output of user/computer interaction, computer components, calculations, etc. It can solve the problems of difficult control of unmanned aerial vehicles and the inability to observe unmanned aerial vehicles in real time, so as to achieve improved control Sexuality and fun, improve user experience, and facilitate detection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described in detail below in combination with specific embodiments and with reference to the accompanying drawings. It should be emphasized that the following description is only exemplary and not intended to limit the scope of the invention and its application.
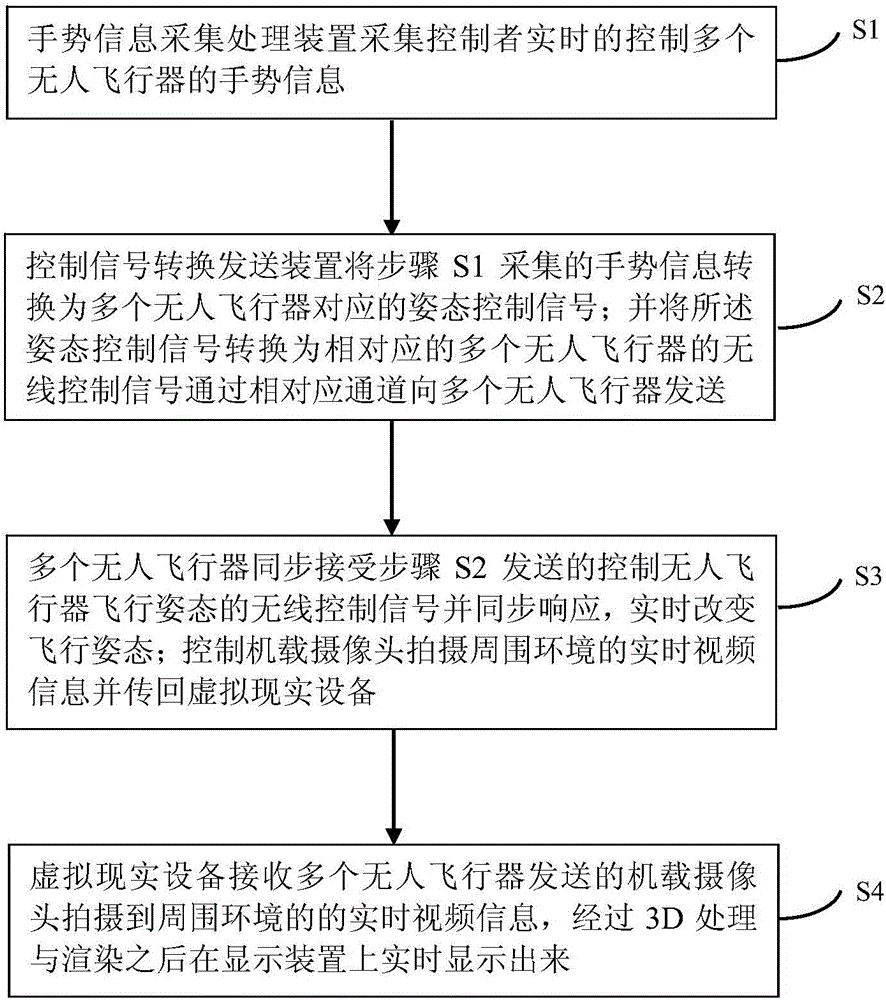
[0031] Such as figure 1 Shown, a kind of method based on computer vision utilizing unmanned aerial vehicle to realize virtual reality, comprises the following steps:
[0032] S1. The gesture information collection and processing device collects the gesture information of the controller to control multiple unmanned aerial vehicles in real time.
[0033] Specifically, the gesture information collection and processing device is used to collect the depth information of the controller's gestures, and the obtained depth information can estimate the distance information between each calibration point of the controller's hand and the collection device. Gesture information is obt...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com