Power line inspection robot and motion control method thereof
A power line inspection and robot technology, applied in the directions of manipulators, manufacturing tools, overhead lines/cable equipment, etc., can solve the problems of tilting and shaking, affecting the accuracy of detection data, etc. compose simple effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0025] The standard parts used in the present invention can be purchased from the market, and the special-shaped parts can be customized according to the instructions and the accompanying drawings. The specific connection methods of each part adopt mature bolts, rivets, welding in the prior art , pasting and other conventional means, no longer described in detail here.
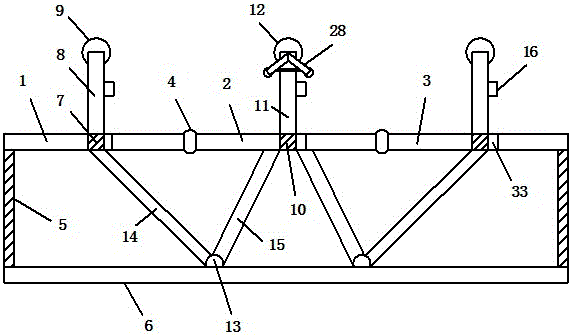
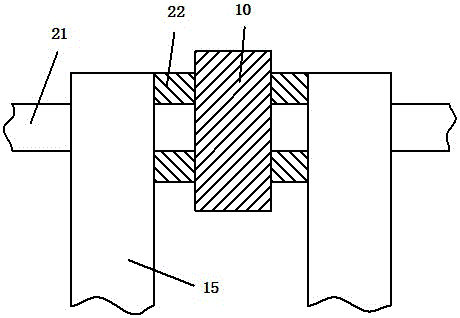
[0026] refer to Figure 1-6 , a specific embodiment of the present invention includes a first connecting plate 1, a second connecting plate 2 and a third connecting plate 3, between the first connecting plate 1 and the second connecting plate 2 and between the second connecting plate 2 and the third connecting plate 3 are connected by the first connecting shaft 4, the free end of the first connecting plate 1 and the free end of the third connecting plate 3 are connected with the substrate 6 through the first spring body 5, the first connecting plate 1 and the third connecting plate 3 The first hydraulic cylin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com