Positioning method and device for patrol robot of transformer substation
A technology of inspection robots and positioning methods, which is applied in navigation computing tools and other directions, and can solve problems such as poor stability, poor fault tolerance, and inapplicability of mobile robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
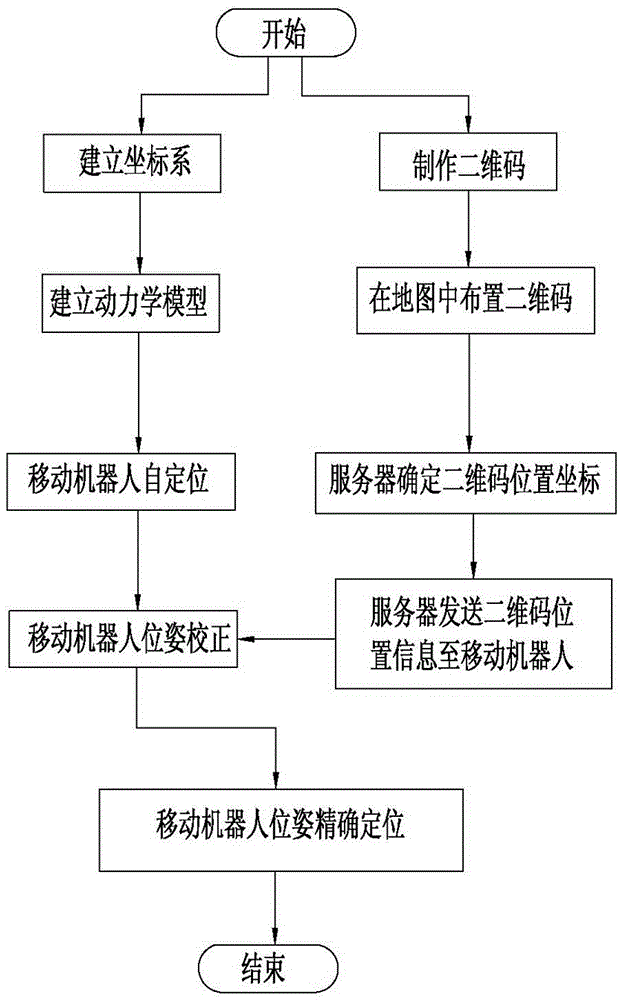
[0078] Embodiment 1: as attached figure 1 , 2 , 3, 4, 5, 6, 7, and 8, the substation inspection robot positioning method includes the following steps:
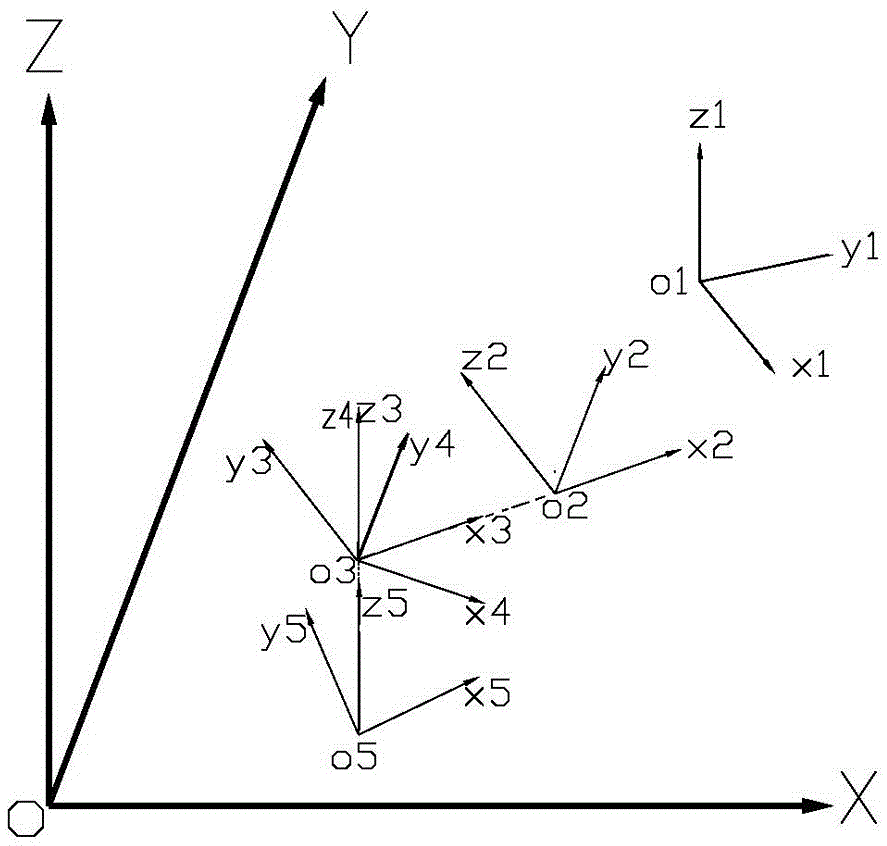
[0079] The first step is to establish a coordinate system, establish a world coordinate system OXYZ, and a two-dimensional code coordinate system o 1 x 1 the y 1 z 1 , the camera coordinate system o 2 x 2 the y 2 z 2 , the coordinate system o of part a of the gimbal 3 x 3 the y 3 z 3 , the coordinate system o of part b of the gimbal 3 x 4 the y 4 z 4 and robot coordinate system o 5 x 5 the y 5 z 5 ;
[0080] Here the QR code coordinate system o 1 x 1 the y 1 z 1 There is translation relative to the world coordinate system OXYZ, and rotation relative to the Z axis. camera coordinate system o 2 x 2 the y 2 z 2 Relative to the QR code coordinate system o 1 x 1 the y 1 z 1 for translation and rotation. The coordinate system of part A of the gimbal o 3 x 3 the y 3 z 3 Relative to the camera coo...
Embodiment 2
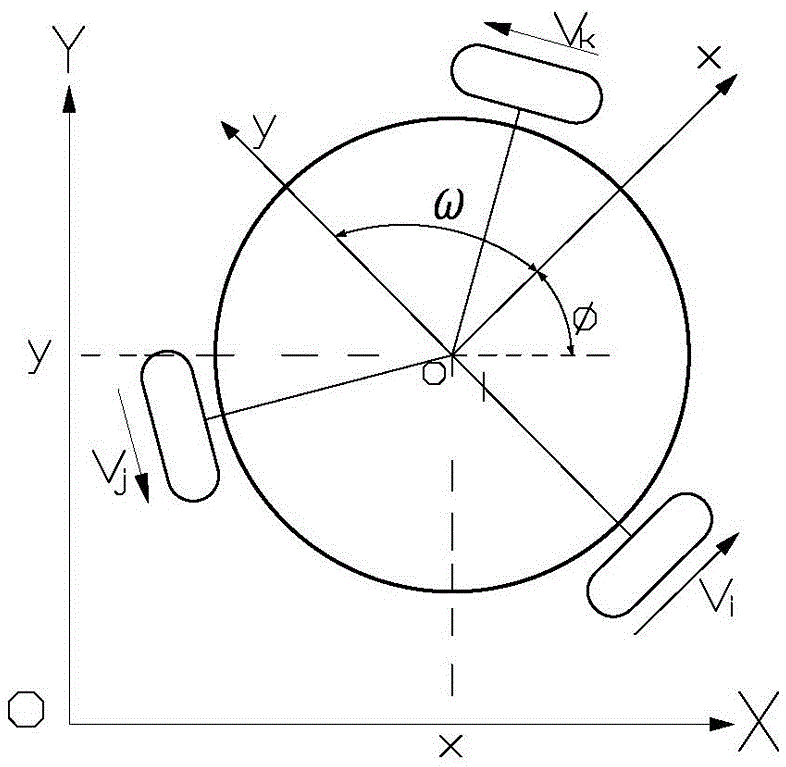
[0131] Embodiment 2: as attached Figure 9 , 10 As shown, a positioning device for a substation inspection robot includes a wheeled platform 1 for driving the robot, a robot motion controller 2 arranged in the wheeled platform 1, an encoder, a communication module, a camera and a cloud platform 3. The wheeled platform 1 is equipped with three omnidirectional wheels 5 at equal intervals along the circumference, and each of the three omnidirectional wheels 5 is equipped with an encoder. The bottom of the platform 3 is provided with a support shaft 4, which is fixedly installed on the wheel On the platform 1, the camera is installed on the top of the cloud platform 3, the robot motion controller 2 is connected to the communication module in two-way communication, the encoder is electrically connected to the robot motion controller 2 in two directions, and the camera and the cloud platform 3 are connected to the communication module Two-way communication connection.
[0132] In ...
Embodiment 3
[0137] Embodiment 3: as attached figure 1 , 2 , 3, 4, 5, 6, 7, 8, 9, and 10, the precise positioning method for the substation inspection robot based on the two-dimensional code information includes the following steps:
[0138] (1) Use the two-dimensional code generator to generate the two-dimensional code information of the substation equipment with the number;
[0139] (2) Bind the generated two-dimensional code picture, paste it on the corresponding equipment of the substation corresponding to the two-dimensional code information and obtain the coordinates of each two-dimensional code in the whole map;
[0140] (3) The trajectory diagram of the robot is automatically generated by the computer, and the trajectory diagram is sent to the mobile robot in a wireless form through a remote PC;
[0141] (4) Put the mobile robot equipped with pan / tilt and high-definition camera in the substation to move according to the trajectory map. During the movement of the robot, the position...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com