Articulated-type rod climbing detection robot
A articulated, robotic technology, applied in the field of robotics, can solve problems such as robot falling off, robot rotating around the rod, and scratch detection rods, etc., to achieve high detection efficiency, good visibility, and easy disassembly.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
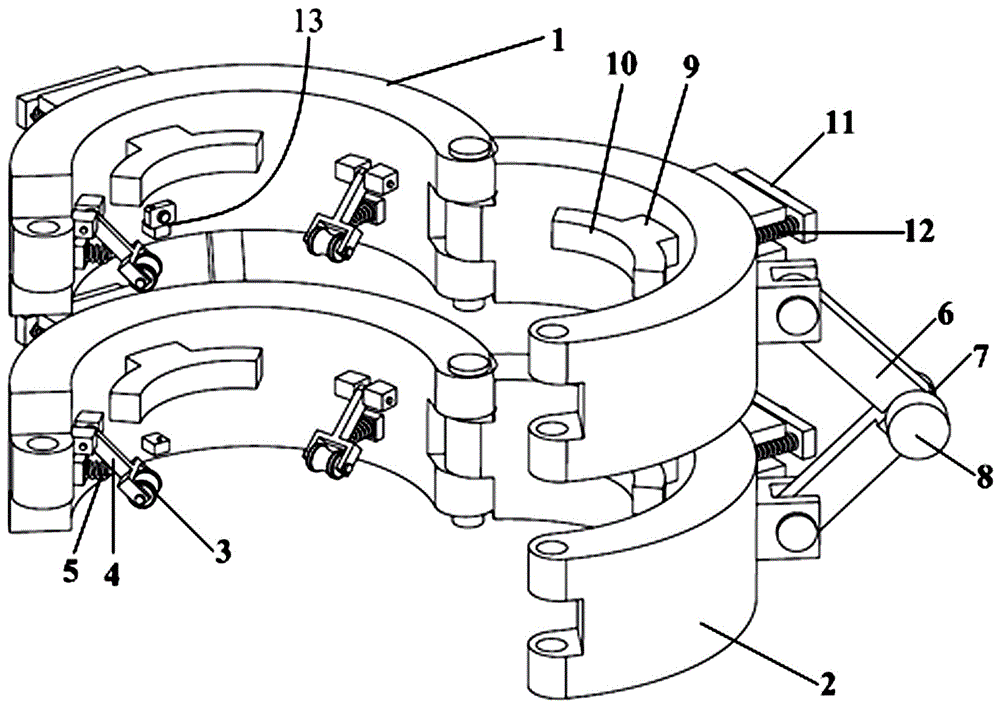
[0021] Such as Figure 1~Figure 3 As shown, the articulated pole climbing detection robot includes a robot body, an image detection system, and a remote control system. The remote control system and the robot body are connected by cables. The robot body includes a first climbing mechanism 1 and a second climbing mechanism 2 .
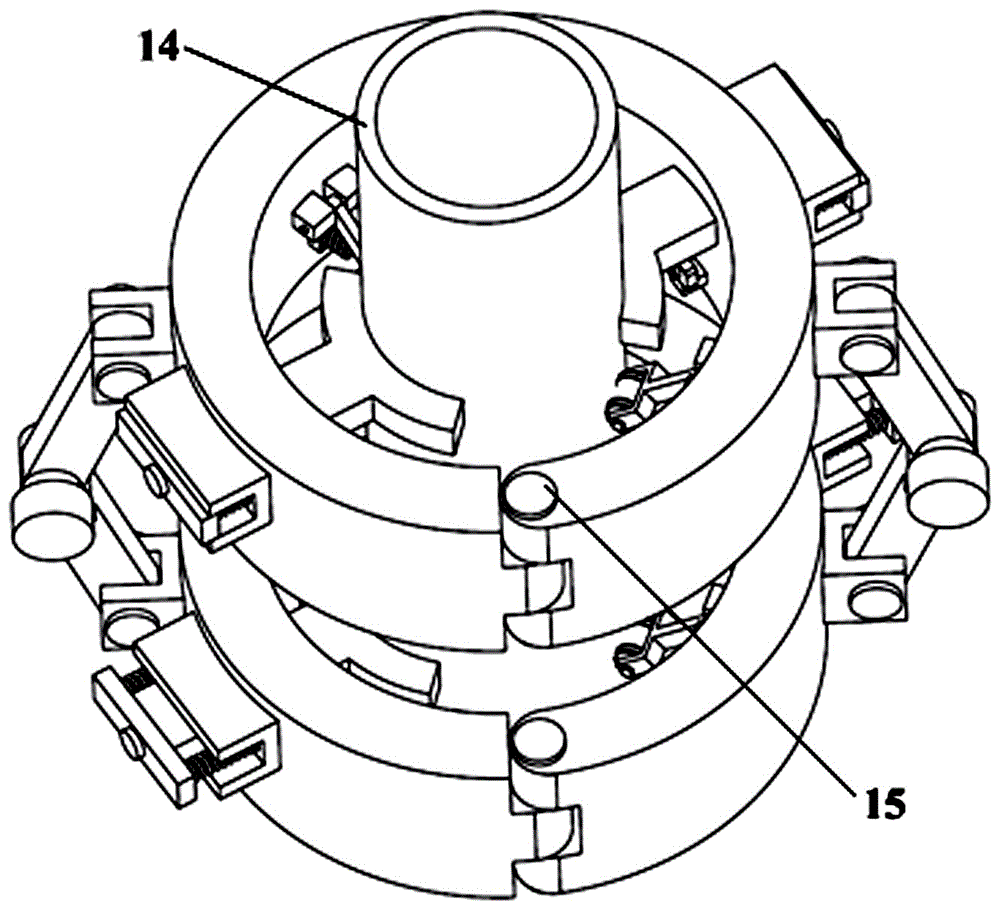
[0022] The first climbing mechanism 1 and the second climbing mechanism 2 are both cylindrical structures formed by connecting two half cylinders, one side of the two half cylinders is hingedly connected, and the other side is connected by bolts 15; the two half cylinders of each climbing mechanism They can rotate relatively around the hinge shaft, and they are connected by bolts 15 to form a complete cylinder. Take off the bolt 15 and put the robot on the detected rod 14, and then lock the bolt 15 to realize the installation of the robot on the detected rod 14 conveniently.
[0023] Three sets of flexible wheels 3 for anti-collision are evenly instal...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com