Emergency operation method for composite wing unmanned aerial vehicle
An unmanned aerial vehicle and composite wing technology, applied in the field of aircraft control, can solve problems such as large forced landing losses, difficulty in quantifying flight speed, altitude and multi-rotor voltage, and inability to reasonably select fixed-wing mode emergency remote control, etc. The effect of improving the success rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
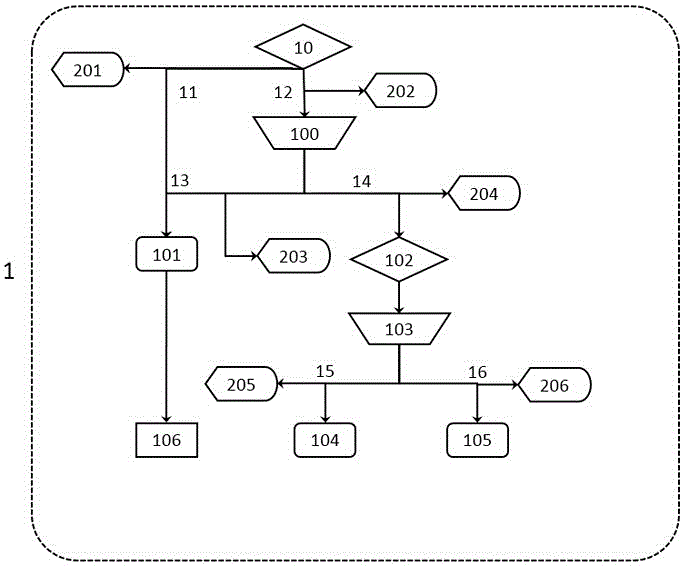
[0028] It is used for the landing control of the compound wing UAV, and is used for the landing control of the compound wing UAV. The emergency operation method is to determine the distance between the compound wing UAV and the ground controller when the compound wing UAV needs to land. , when the above distance exceeds the remote control distance, the composite wing UAV uses its autopilot to complete automatic landing;
[0029] When the above distance is within the remote control distance, the ground controller sends a control mode command to the composite wing UAV, and the control mode command is any one of automatic emergency control and manual emergency control;
[0030] The automatic emergency control is: the compound wing UAV uses the autopilot on it to complete automatic landing;
[0031] The manual emergency control is: the composite wing UAV uses the landing control command sent by the ground controller to complete the manual landing.
[0032] Specifically, the dista...
Embodiment 2
[0035] This embodiment is further limited on the basis of Embodiment 1. When the compound-wing UAV receives the control mode instruction of manual emergency control, the following operations are performed: obtaining the flight speed of the compound-wing UAV, obtaining the The charge of the battery powering the vertical propeller;
[0036]When the flight speed of the compound-wing UAV is greater than the controllable maximum speed of the multi-rotor or the power of the battery is less than the work required to land on the ground according to the preset maximum sinking rate, use the ground controller to switch the compound-wing UAV to fixed-wing flight mode; otherwise, use the ground controller to switch the compound wing UAV to multi-rotor flight mode.
[0037] The maximum controllable speed of the multi-rotor is 0.85 to 0.95 times of the lower value of the stall speed of the fixed wing and the stall speed of the multi-rotor propeller.
[0038] When the flight speed of the com...
Embodiment 3
[0041] This embodiment further defines this case on the basis of any one of the technical solutions provided by any one of the above embodiments: in order to provide a basis for manual emergency control, at the same time conduct human-computer interaction through vision and / or hearing, and avoid single visual interaction As a result, the operator is distracted. When the compound-wing UAV needs to land, the compound-wing UAV sends one or more of the following information to the ground controller: flight speed, altitude, battery voltage, and level flight propeller speed , vertical propeller speed; and after the ground controller receives the information, it outputs to the operator through images and / or voice.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com