Multi-robot scheduling method based on repulsion potential field
A multi-robot, repulsive potential field technology, applied in the direction of instruments, control/adjustment systems, two-dimensional position/channel control, etc., can solve problems such as robot interference and collision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
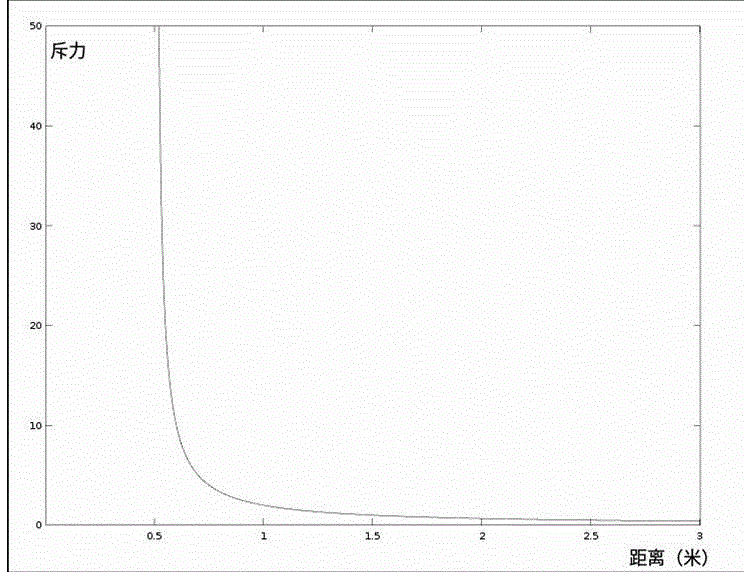
[0025] Such as Figure 1 Shown is a graph of the relationship between repulsion force and robot distance, repulsion force = -0.3*log((distance-0.8) / 2). Among them, distance represents the distance between two robots, log represents the logarithm with base 10, and force represents the repulsive force. It can be seen intuitively from the figure that the repulsive force tends to be weak when the distance between the robots is 0.5 meters, which can make the distance between the robots not less than 0.5 meters. The repulsive force tends to be infinitely small when it is based on approaching infinity, that is, the farther robots do not affect each other. Robots that are closer will try to avoid collisions.
[0026] 1. Absolute coordinates
[0027] Each robot uses an indoor base station, combined with the GPS positioning method, to locate the current coordinates of the robot, and the current coordinates are absolute coordinates.
[0028] 2. Map representation
[0029] The map is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com