Multi-unit connection rod driving type heavy-duty loading robot with three rocker arms
A link-driven, multi-unit technology, applied in mechanically driven excavators/dredgers, earth movers/shovels, construction, etc., can solve the poor stability and lack of overload of the boom lifting mechanism and bucket control mechanism Protection and vibration absorption means, poor dynamic performance and other problems, to achieve the effect of realizing numerical control of operations, avoiding low transmission efficiency and reducing energy consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The technical solutions of the present invention will be further described below through the accompanying drawings and embodiments.
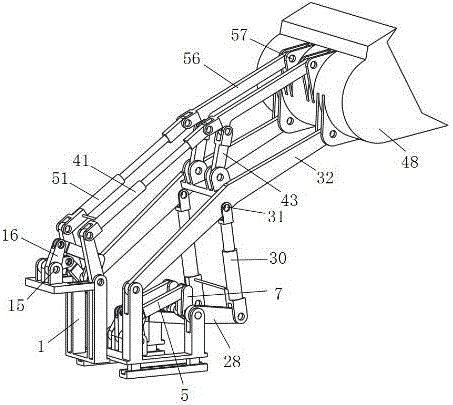
[0032] control figure 1 , a multi-unit link-driven heavy-duty loading robot with three rocker arms according to the present invention includes a multi-unit link drive mechanism, a boom lifting mechanism, a bucket control mechanism and a frame 1 .
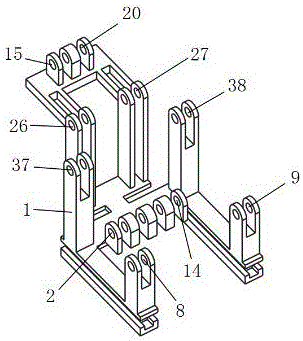
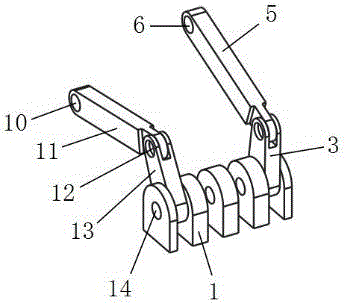
[0033] control figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Figure 6 , Figure 7 , Figure 8 , the multi-unit link drive mechanism includes a boom multi-unit link drive mechanism and a bucket multi-unit link drive mechanism, and the boom multi-unit link drive mechanism includes a first drive branch chain and a second drive branch chain , the frame 1, the first crankshaft 7, the first drive branch chain includes the first active rod 3, the first connecting rod 5, one end of the first active rod 3 is connected with the frame 1 through the first rotating pair 2, The other en...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com