Motor imagery brain-computer interface control method based on noninvasive electrical stimulation
A control method and motion imagery technology, applied in computer components, mechanical mode conversion, electrical digital data processing, etc., can solve problems such as inability to improve users' spontaneous adjustment of SMR skills, user fatigue and discomfort, and ineffective effects, etc., and achieve relief Learning burden, low hardware resource requirements, enhanced excitability effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040]The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
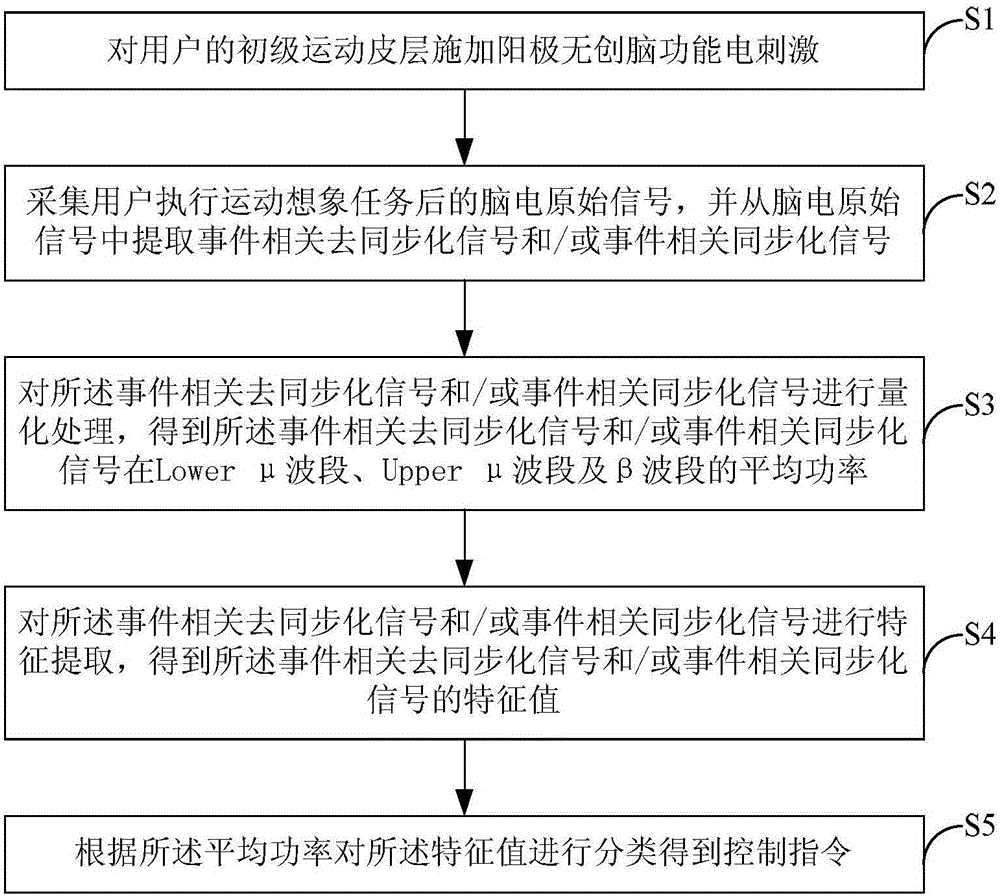
[0041] figure 1 It is a schematic flowchart of a motor imagery brain-computer interface control method based on non-invasive electrical stimulation according to an embodiment of the present invention. Such as figure 1 As shown, the above-mentioned control method mainly includes the following steps:
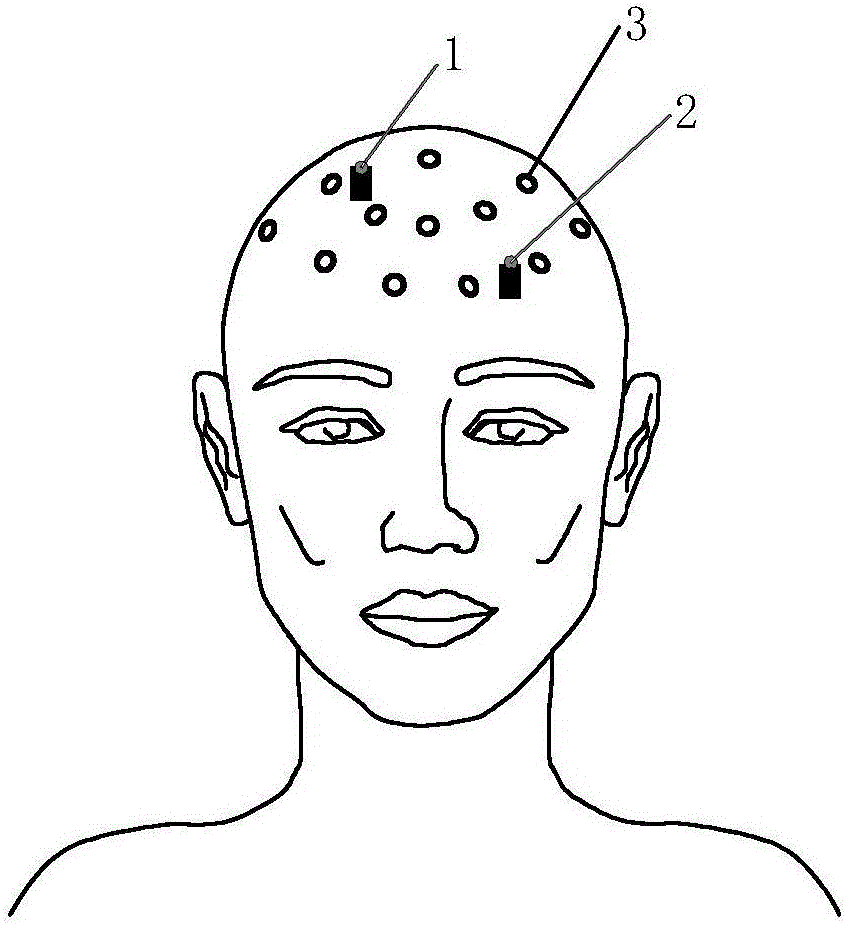
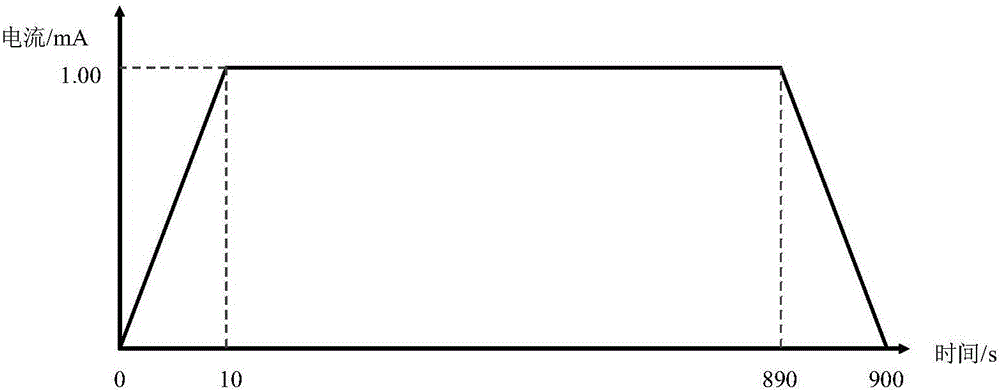
[0042] Step S1, applying anode non-invasive electrical stimulation of brain function to the user's primary motor cortex.
[0043] During specific implementation...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com