Detecting method for trapped floor-cleaning robot
A technology of sweeping robots and detection methods, applied in the direction of instruments, measuring devices, radio wave measuring systems, etc., to achieve the effect of avoiding direct collisions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
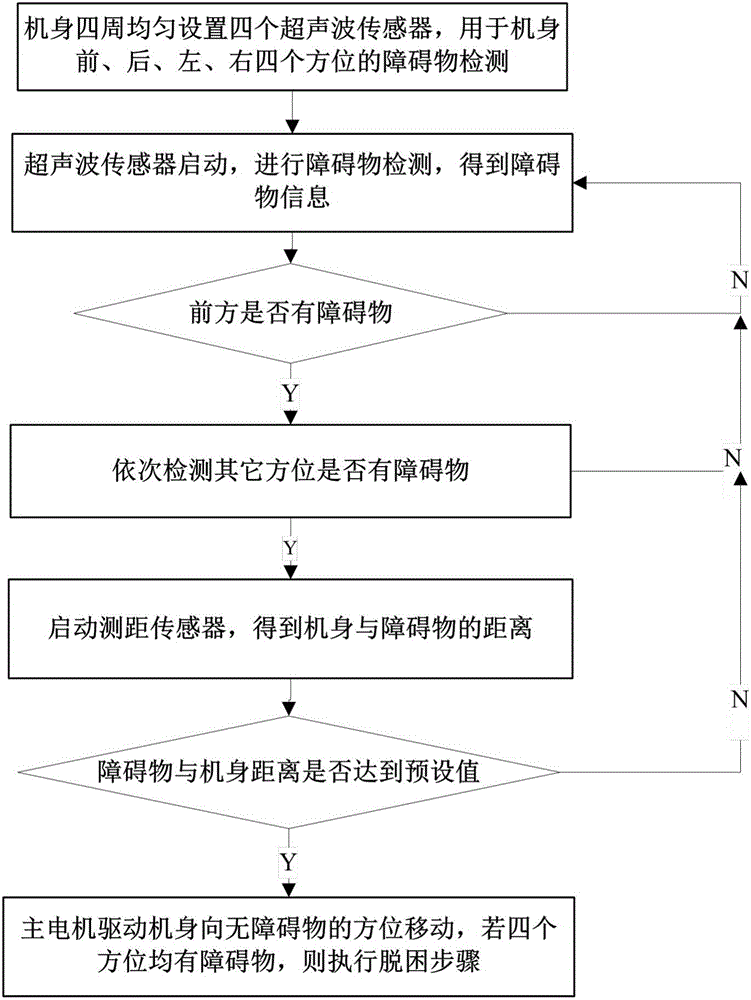
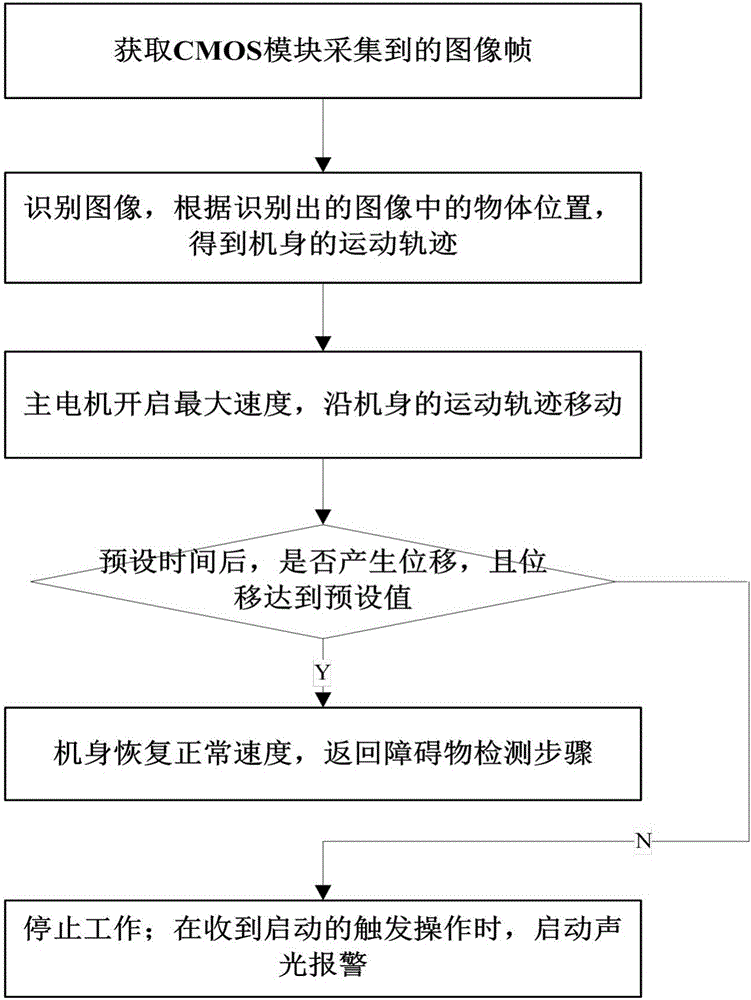
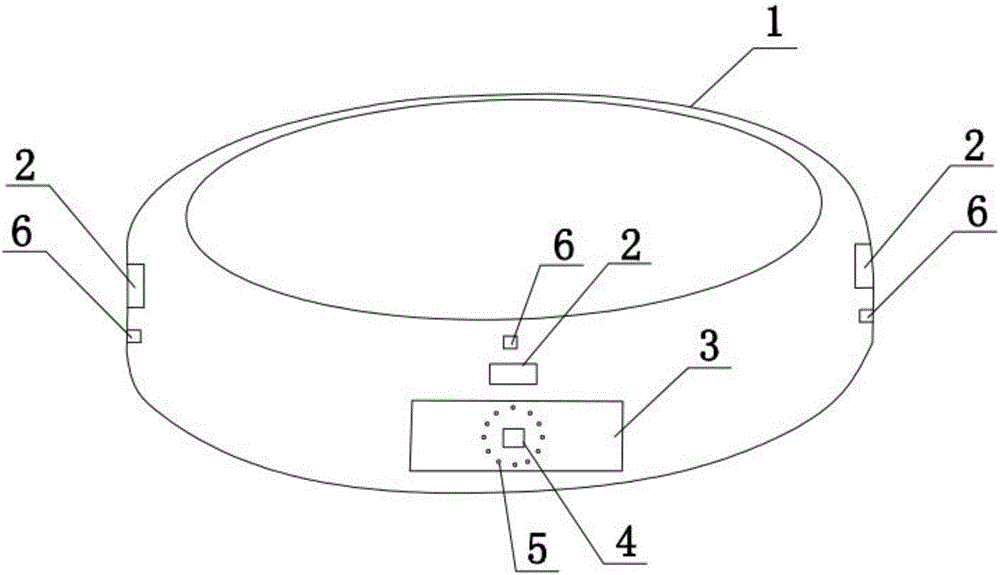
[0028] Such as figure 1 , image 3 As shown, a sweeping robot trapped detection method includes the following steps:
[0029] Step 1, four ultrasonic sensors 2 and four ranging sensors 6 are evenly arranged around the fuselage 1. The ultrasonic sensors 2 are used to detect obstacles in four directions of front, rear, left and right of the fuselage 1. The ranging sensors 6 It is used for distance detection between the body 1 and obstacles; a CMOS module 4 is set on the body 1 to collect image frame data;
[0030] Step 2, the start signal is detected, and the sweeping robot starts to work;
[0031] Step 3, start the ultrasonic sensor, detect obstacles, and obtain obstacle information;
[0032] Step 4, whether there is an obstacle in front, if there is no obstacle, go to step 2; If there is no obstacle, then perform step 2. If there is an obstacle in ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com