Hip joint rehabilitation robot track and speed tracking self-adaptive control method
A rehabilitation robot and adaptive control technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as tracking speed without consideration of rehabilitation training, patient discomfort, unsafety, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
[0083] The present invention is an adaptive control method for trajectory and speed tracking of a hip joint rehabilitation robot, which is applied to a hip joint rehabilitation robot. The hip joint rehabilitation robot includes 1 rotary driver and 4 linear drivers, and the rotary driver is used to drive the robot. Actively rotate the joint to train the adduction and abduction of the patient's hip joint. The linear driver is used to drive the active moving joint of the robot to train the flexion and extension of the patient's hip joint. The trajectory and speed tracking of the hip joint rehabilitation robot automatically The adaptive control method is implemented through the following steps:
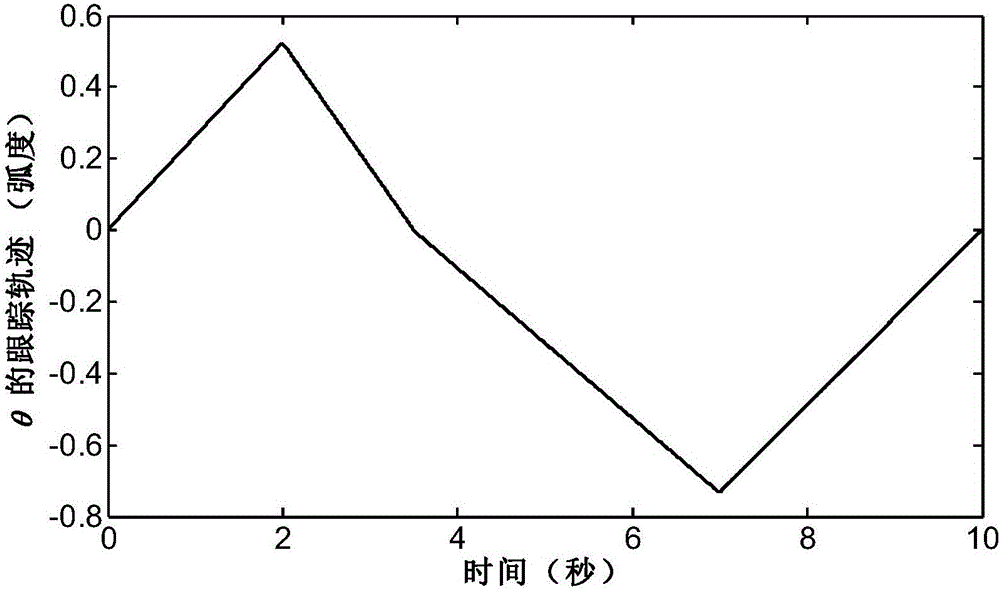
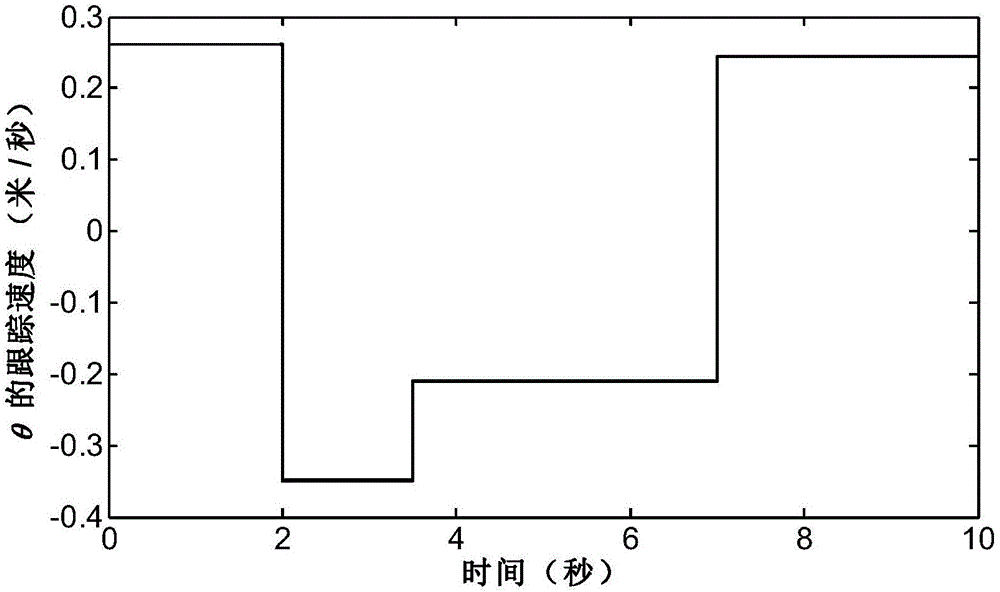
[0084] Step 1, according to the physiological function of the human hip joint, design the expected tracking trajectory of rehabilitation training as follows:
[0085] Step 1.1, in order to train the adduction and abduction of the right hip joint, the expected tracking trajectory of the ro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com